

 車体の動力で自動運転を行うトレインシステムは2011年に製作した機械式玉運びトレインがあります。(https://www.youtube.com/watch?v=84Cxzg3yb3g) 今作はそれの欠点を踏まえ、全面的に作り直したものです。
以下をコンセプトに作りました。
1. 長時間運転可能な信頼性
2. 車体リバーシブルデザイン
3. 各種ユニットの共通部分をモジュール化
1. 長時間運転可能な信頼性
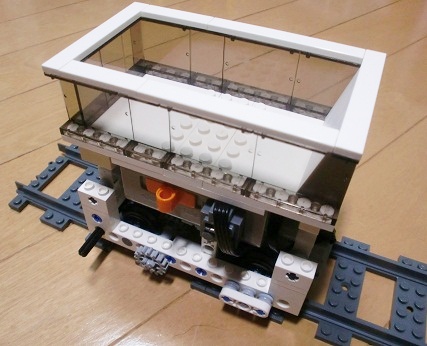
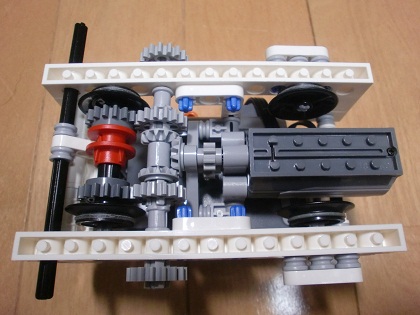
旧トレインは機械式クラッチで方向転換を行っていました。これには、走っているうちにクラッチが振動などでニュートラルに戻ってしまい電車が停止してしまうという問題がありました。今作では、電気接点のスイッチ部品を使用して方向転換を行っています。クラッチ式に比べ機械的な魅力は減りますが、勝手にニュートラルに戻ってしまうことがありません。フレームはスタッドレス構造で分解し難くなっています。
旧型 (2011)
車体の動力で自動運転を行うトレインシステムは2011年に製作した機械式玉運びトレインがあります。(https://www.youtube.com/watch?v=84Cxzg3yb3g) 今作はそれの欠点を踏まえ、全面的に作り直したものです。
以下をコンセプトに作りました。
1. 長時間運転可能な信頼性
2. 車体リバーシブルデザイン
3. 各種ユニットの共通部分をモジュール化
1. 長時間運転可能な信頼性
旧トレインは機械式クラッチで方向転換を行っていました。これには、走っているうちにクラッチが振動などでニュートラルに戻ってしまい電車が停止してしまうという問題がありました。今作では、電気接点のスイッチ部品を使用して方向転換を行っています。クラッチ式に比べ機械的な魅力は減りますが、勝手にニュートラルに戻ってしまうことがありません。フレームはスタッドレス構造で分解し難くなっています。
旧型 (2011)
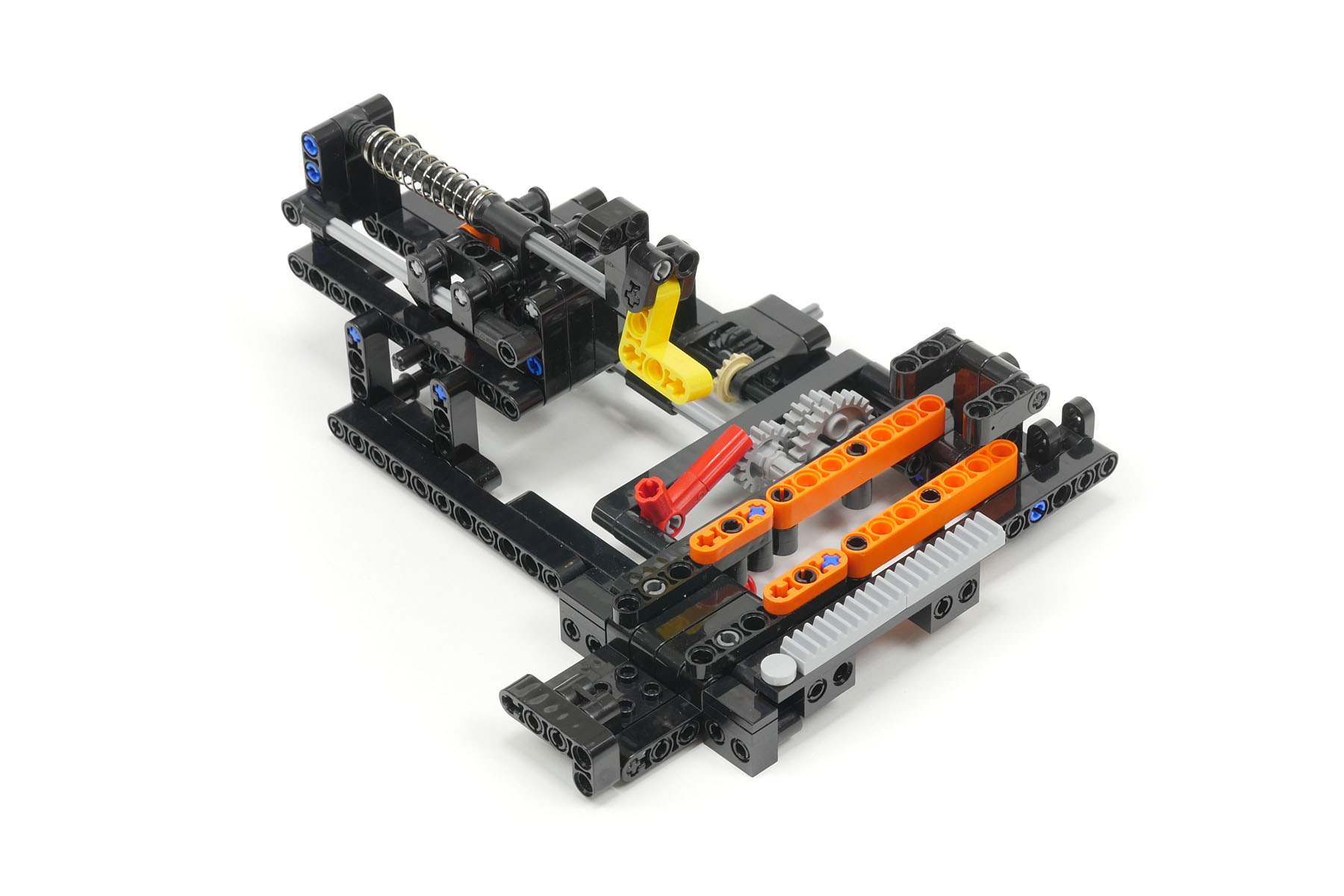
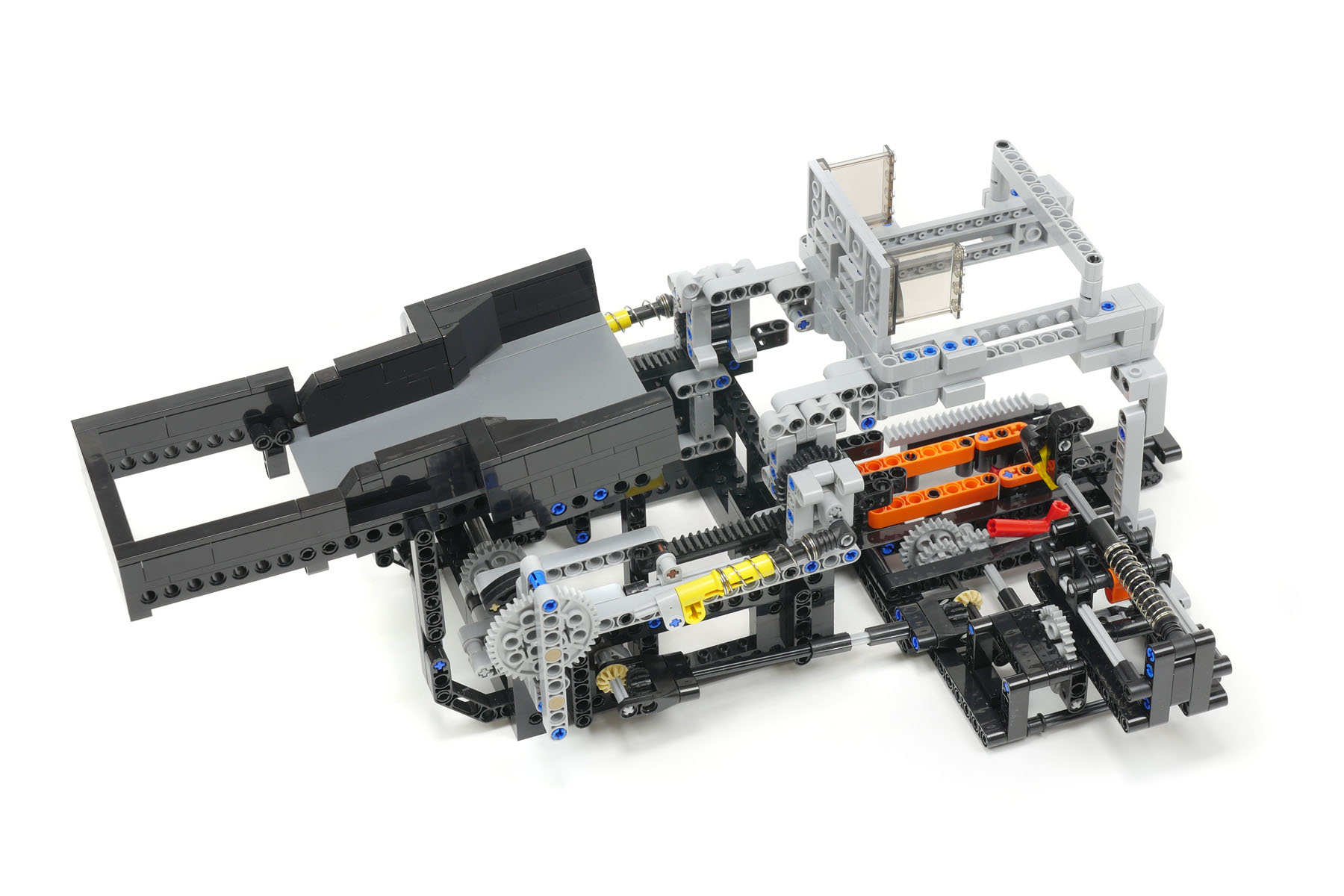
 新型 (2018)
新型 (2018)

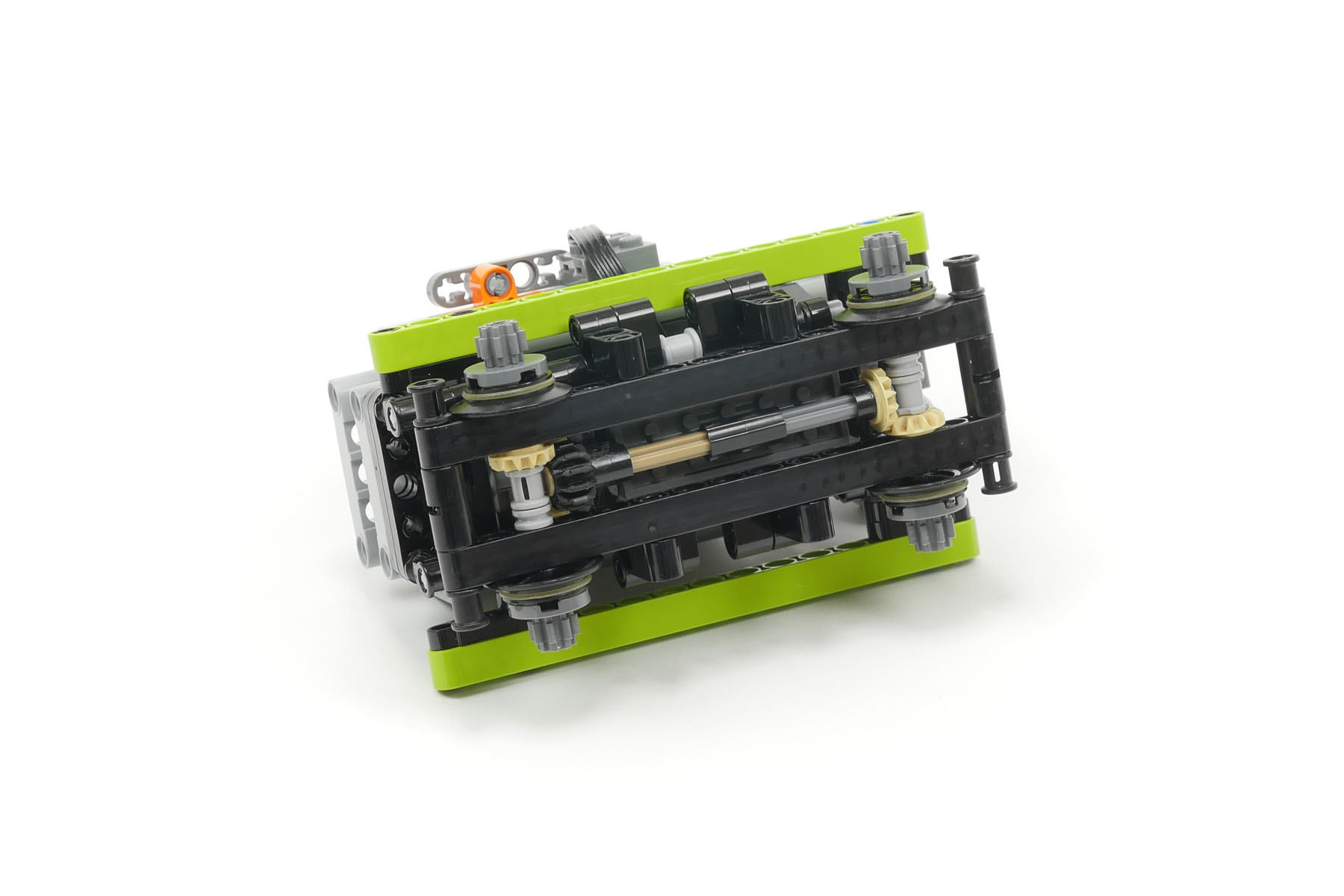
 2. 車体リバーシブルデザイン
車体は対称構造になっていて、前と後ろの区別がありません。これにより、ユニットへの侵入方向が制限されなくなり、レイアウトの自由度が増します。また、方向転換ユニットの共通化が可能になっています。
2. 車体リバーシブルデザイン
車体は対称構造になっていて、前と後ろの区別がありません。これにより、ユニットへの侵入方向が制限されなくなり、レイアウトの自由度が増します。また、方向転換ユニットの共通化が可能になっています。
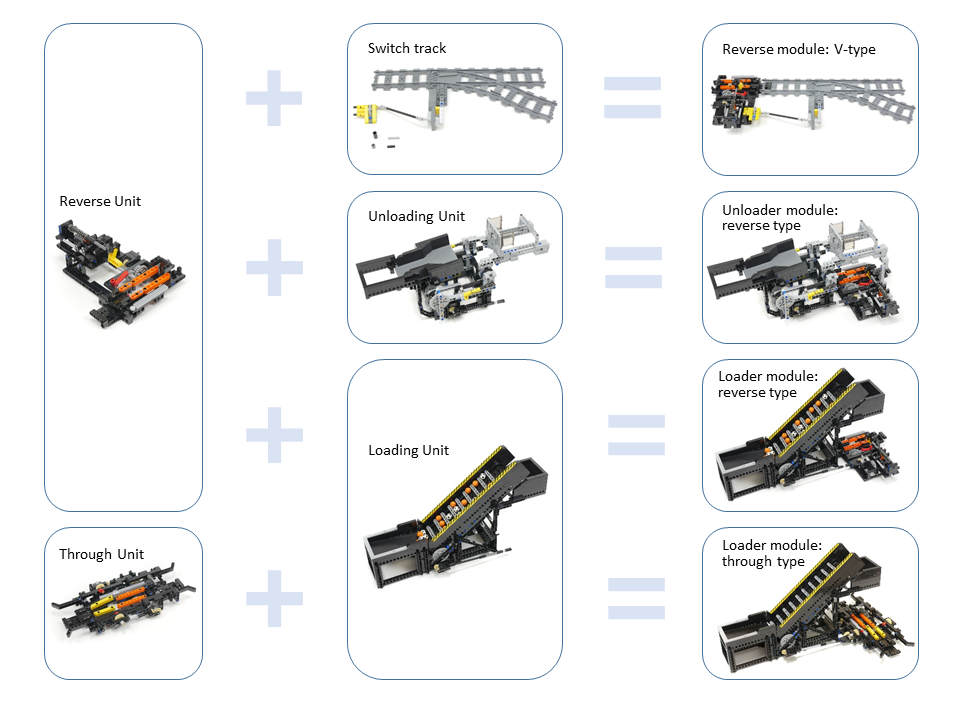
 3. 各種ユニットの共通部分をモジュール化
積み込みユニットや荷下ろしユニットなどの各ユニットは共通部分をモジュール化しています。これにより新しいユニットを製作するときに共通部分をそのまま流用できます。
3. 各種ユニットの共通部分をモジュール化
積み込みユニットや荷下ろしユニットなどの各ユニットは共通部分をモジュール化しています。これにより新しいユニットを製作するときに共通部分をそのまま流用できます。
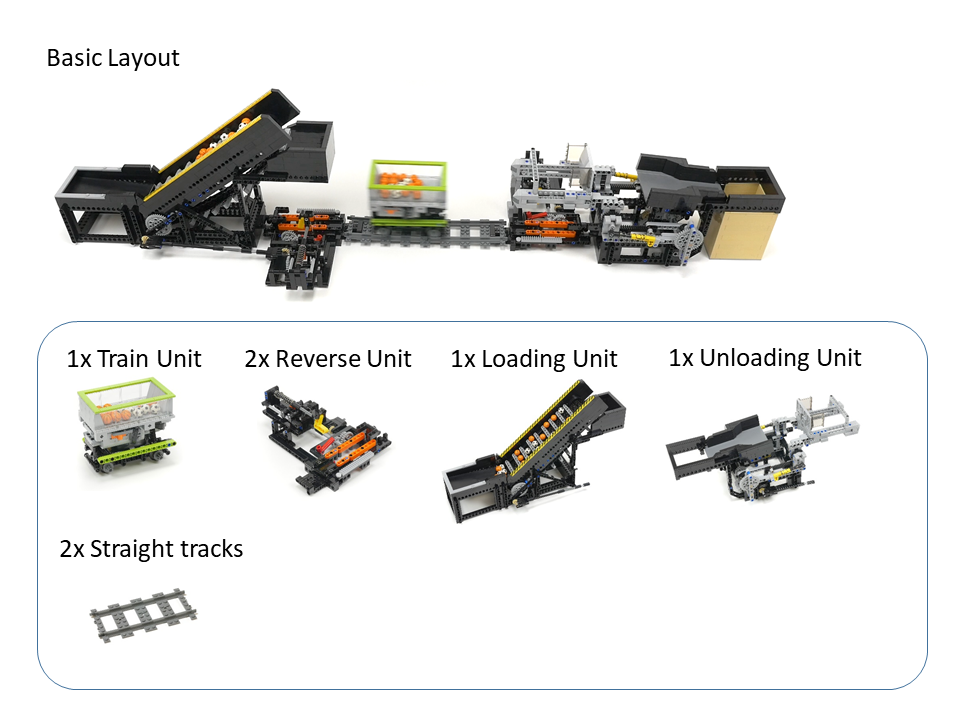
 基本レイアウトの構成ユニット:
基本レイアウトの構成ユニット:
 各ユニットのインストラクションとMPDファイル:
A18010_TrainUnit Instruction [PDF]
A18010_TrainUnit [MPD]
各ユニットのインストラクションとMPDファイル:
A18010_TrainUnit Instruction [PDF]
A18010_TrainUnit [MPD]
 A18011_TrainReverseUnit Instruction [PDF]
A18011_TrainReverseUnit [MPD]
A18011_TrainReverseUnit Instruction [PDF]
A18011_TrainReverseUnit [MPD]
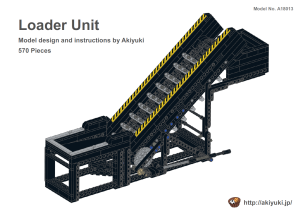
 A18013_TrainLoaderUnit Instruction [PDF]
A18013_TrainLoaderUnit [MPD]
A18013_TrainLoaderUnit Instruction [PDF]
A18013_TrainLoaderUnit [MPD]
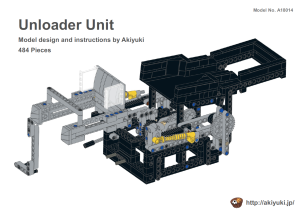
 A18014_TrainUnloaderUnit Instruction [PDF]
A18014_TrainUnloader [MPD]
A18014_TrainUnloaderUnit Instruction [PDF]
A18014_TrainUnloader [MPD]
 2018/7/16 MPDファイル追加
2018/7/16 MPDファイル追加 03/03/2018