Started: June 2019
Completed: August 2019
Released: September 2019
Instructions are available here
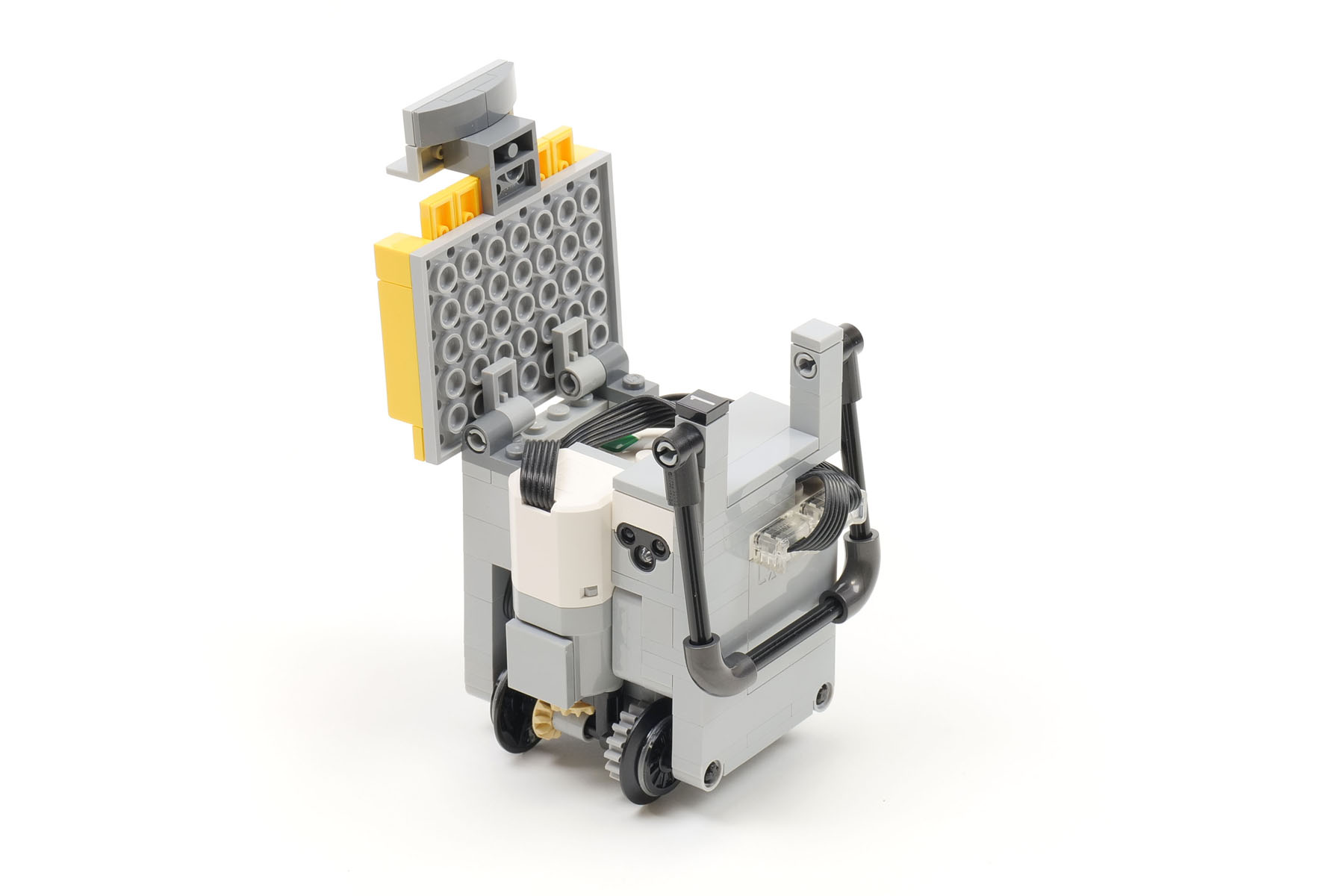
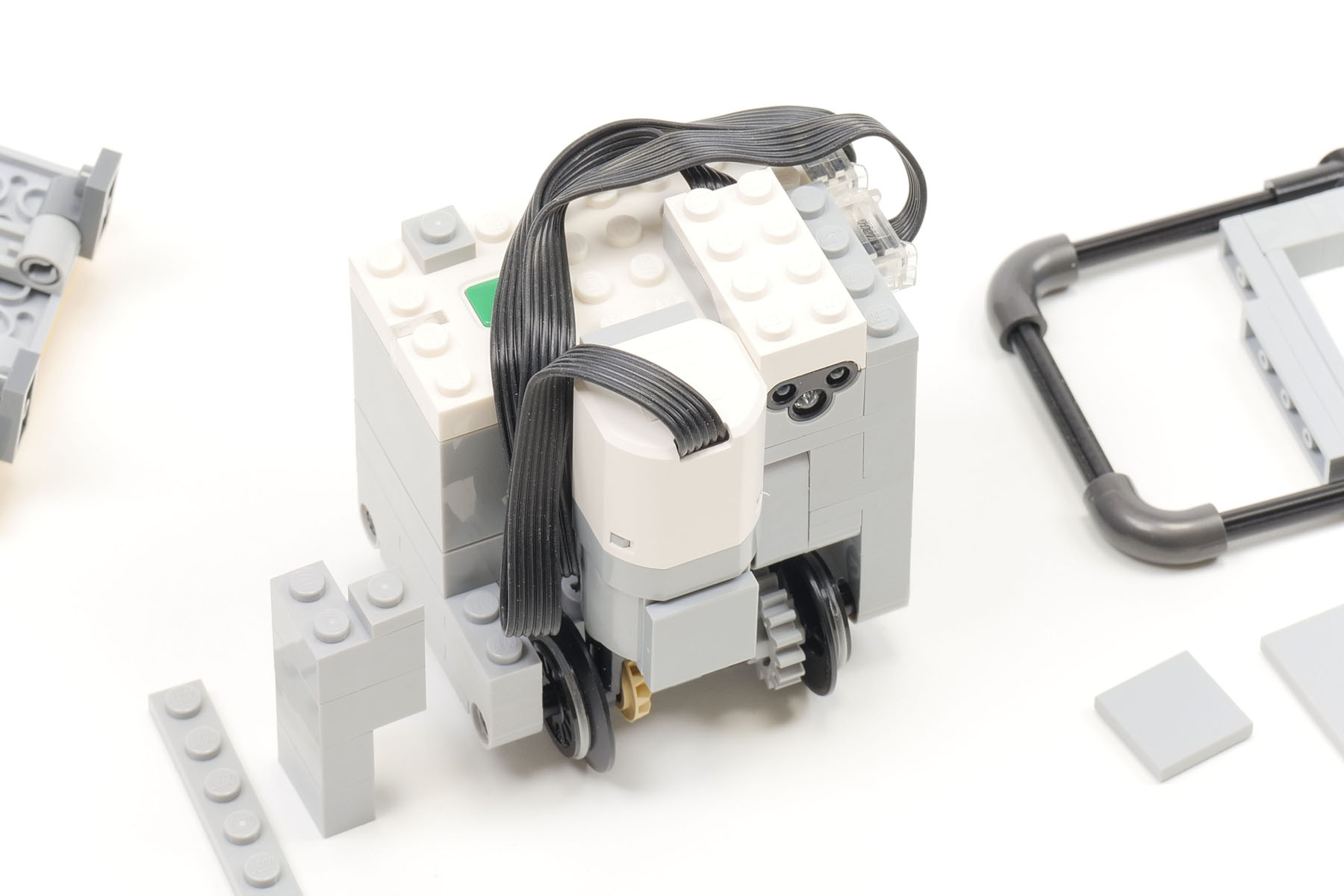
I made a car that carries the balls with Adaptive Cruise Control (ACC). I use Lego’s Powered Up platform. This car has a Powered Up hub, driving motor, and distance sensor. I programmed to run while keeping a certain distance from the obstacle.



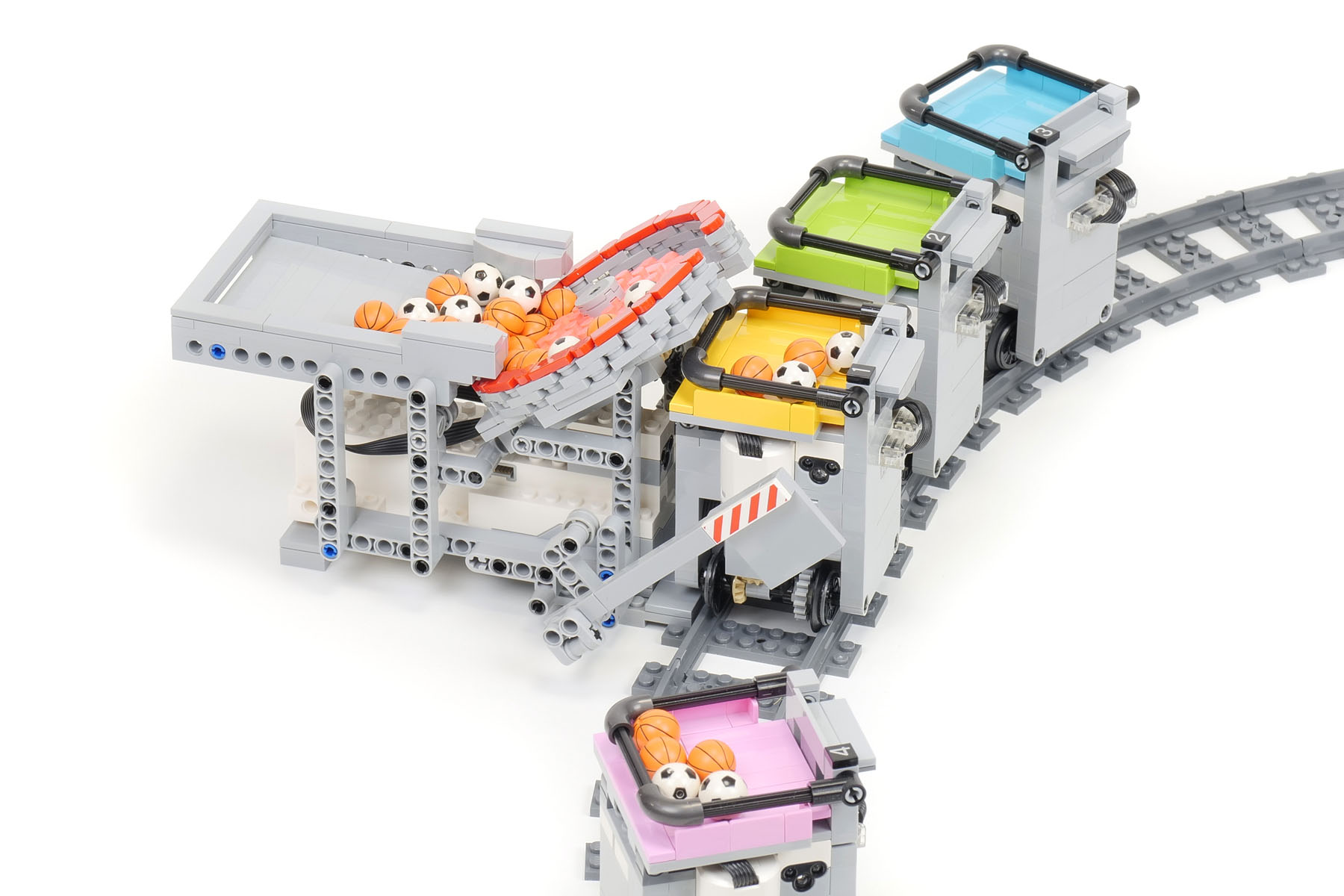
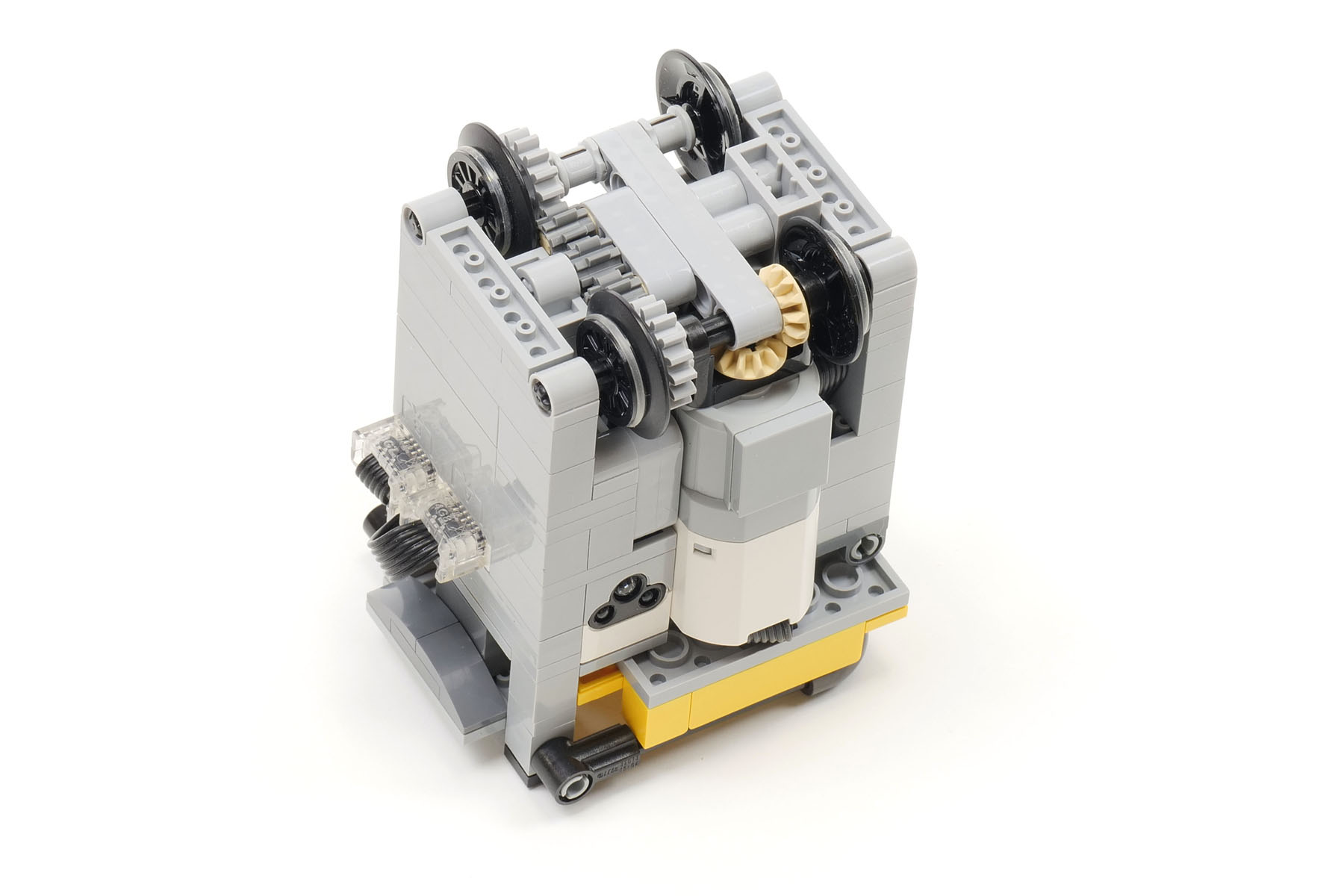
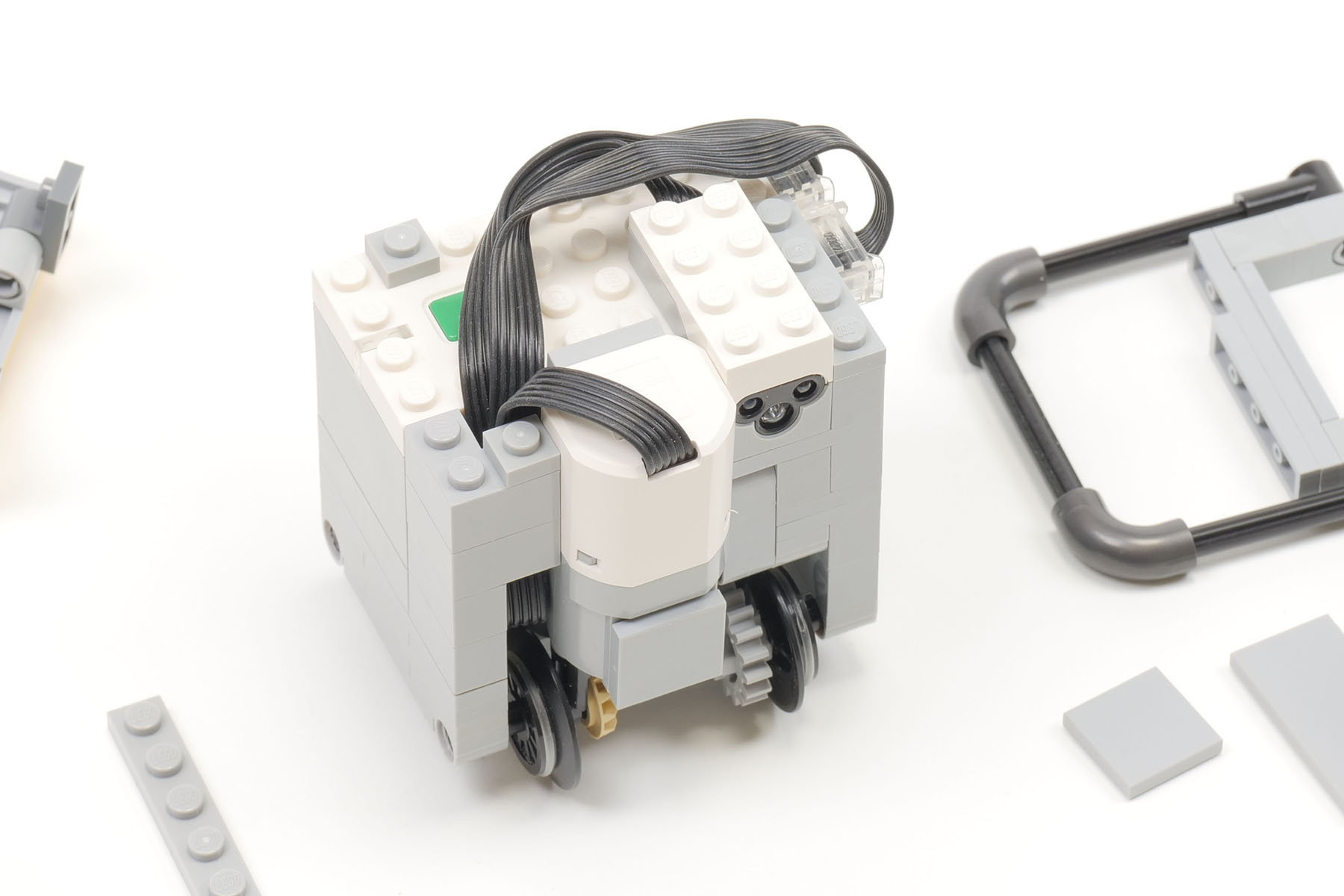
The car body was made with a focus on compactness. A small body is packed with a Powered Up hub, motor, and distance sensor. This car is small but four-wheel drive.




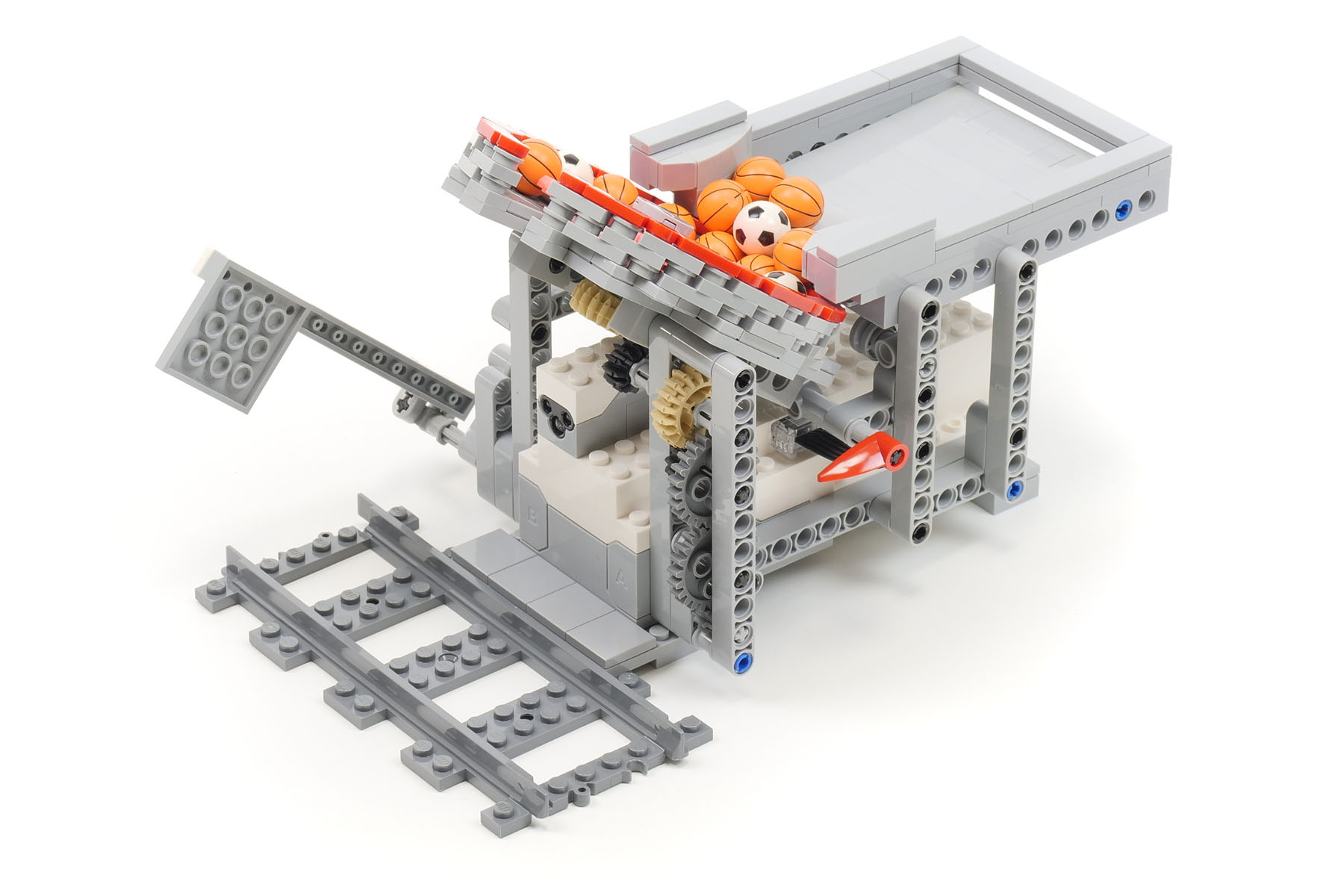
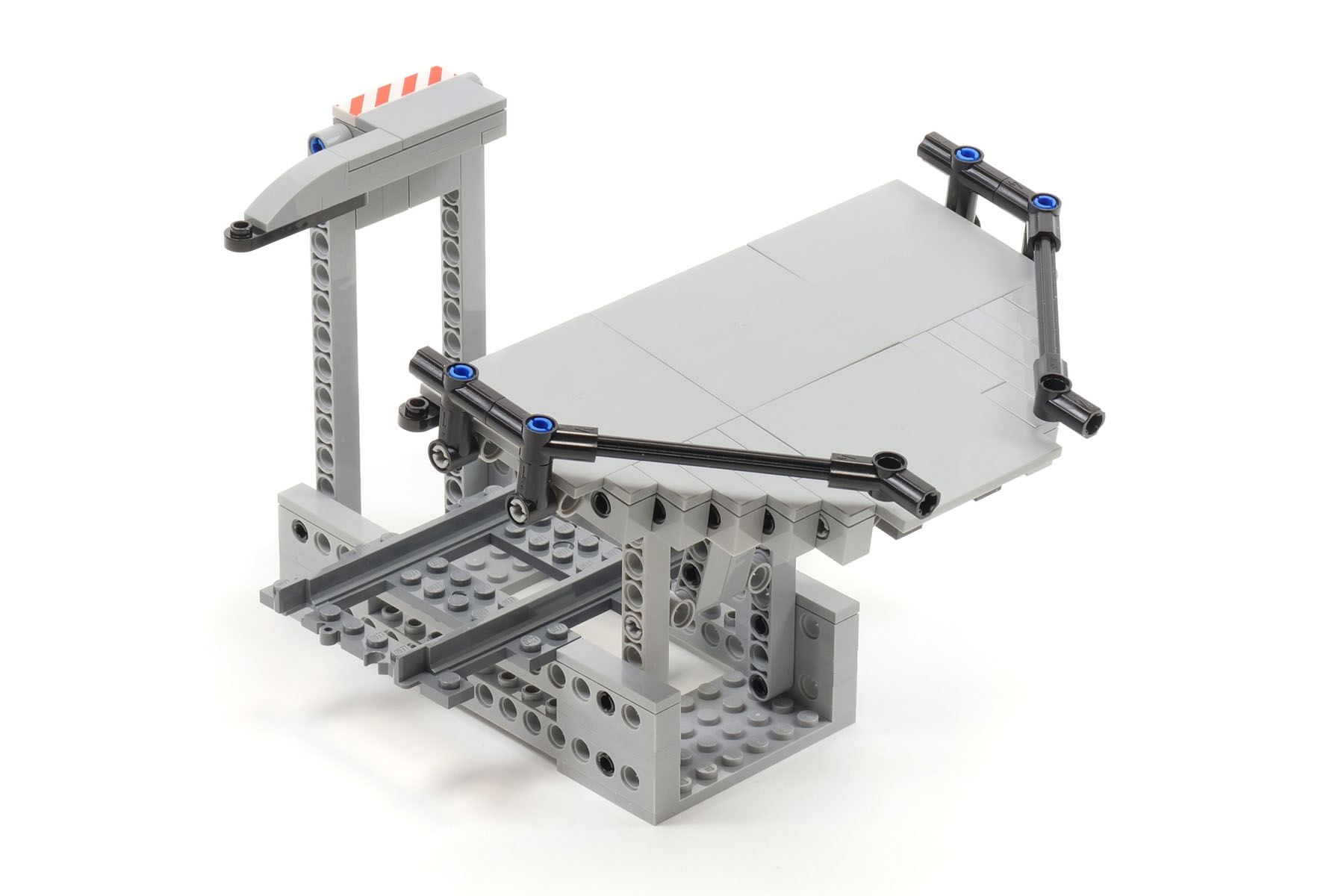
The loading part was made using a Powered Up move hub. Two motors built in the move hub drive the star wheel and gate. A distance sensor is used to detect the arrival of a car. With the red lever, we can press the green power button on the Move Hub. I used a new part 35446(BrickLink) for the star wheel.


Instructions (free download)
Car

PDF Instructions:
A19030I(pdf instructions)
MPD file:
A19030M(mpd cad file)
BSX parts list:
A19030P(bsx)
Loader
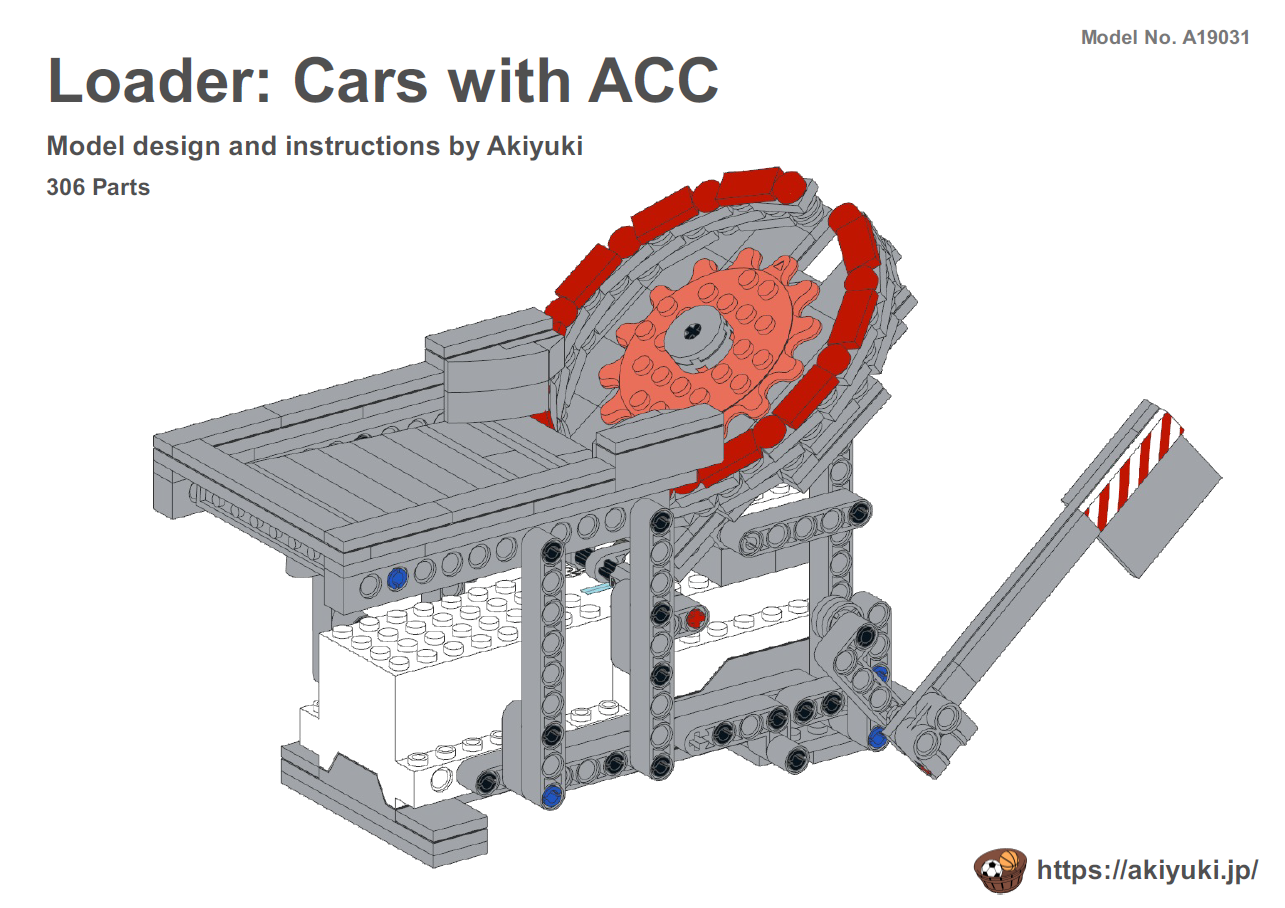
PDF Instructions:
A19031I(pdf instructions)
MPD file:
A19031M(mpd cad file)
BSX parts list:
A19031P(bsx)
Unloader
PDF Instructions:
A19032I(pdf instructions)
MPD file:
A19032M(mpd cad file)
BSX parts list:
A19032P(bsx)
Notice:
The instructions and Parts lists do not include rails.
The instructions do not include the description of wiring or programs. Please refer the photos and videos.
The instructions are intended for persons who have experience assembling Lego Technic.