Started: November 2019
Completed: December 2019
Released: January 2020
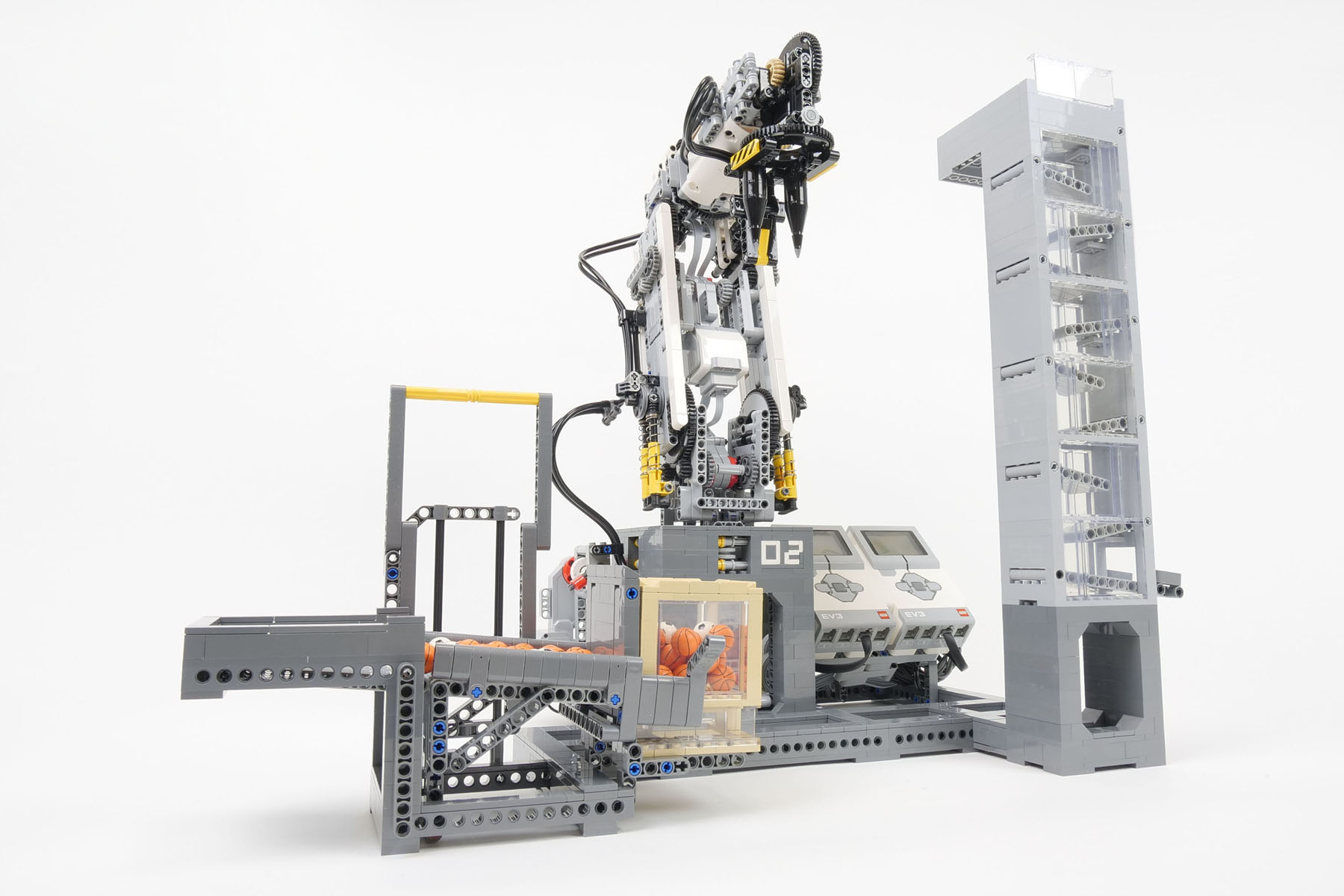
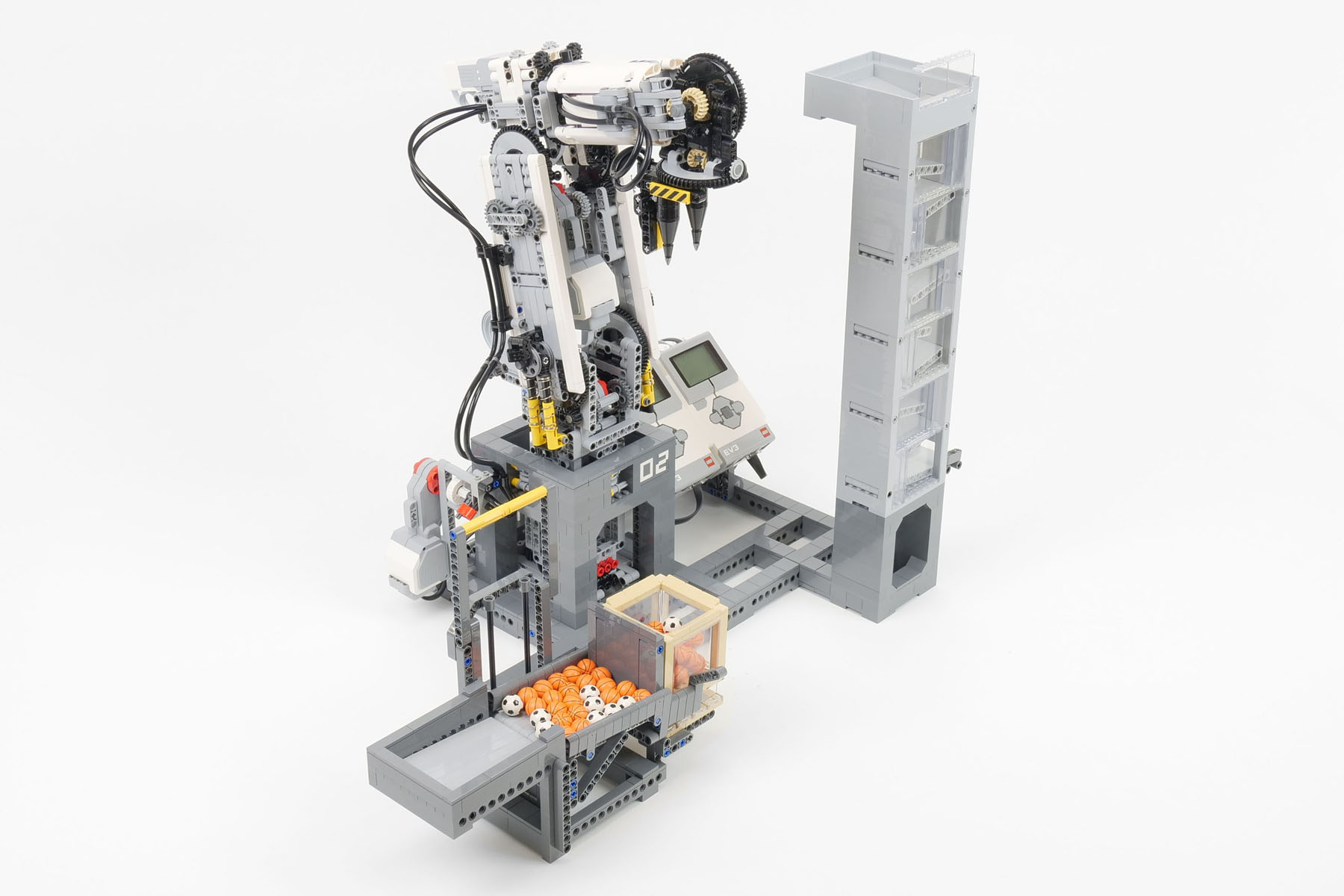
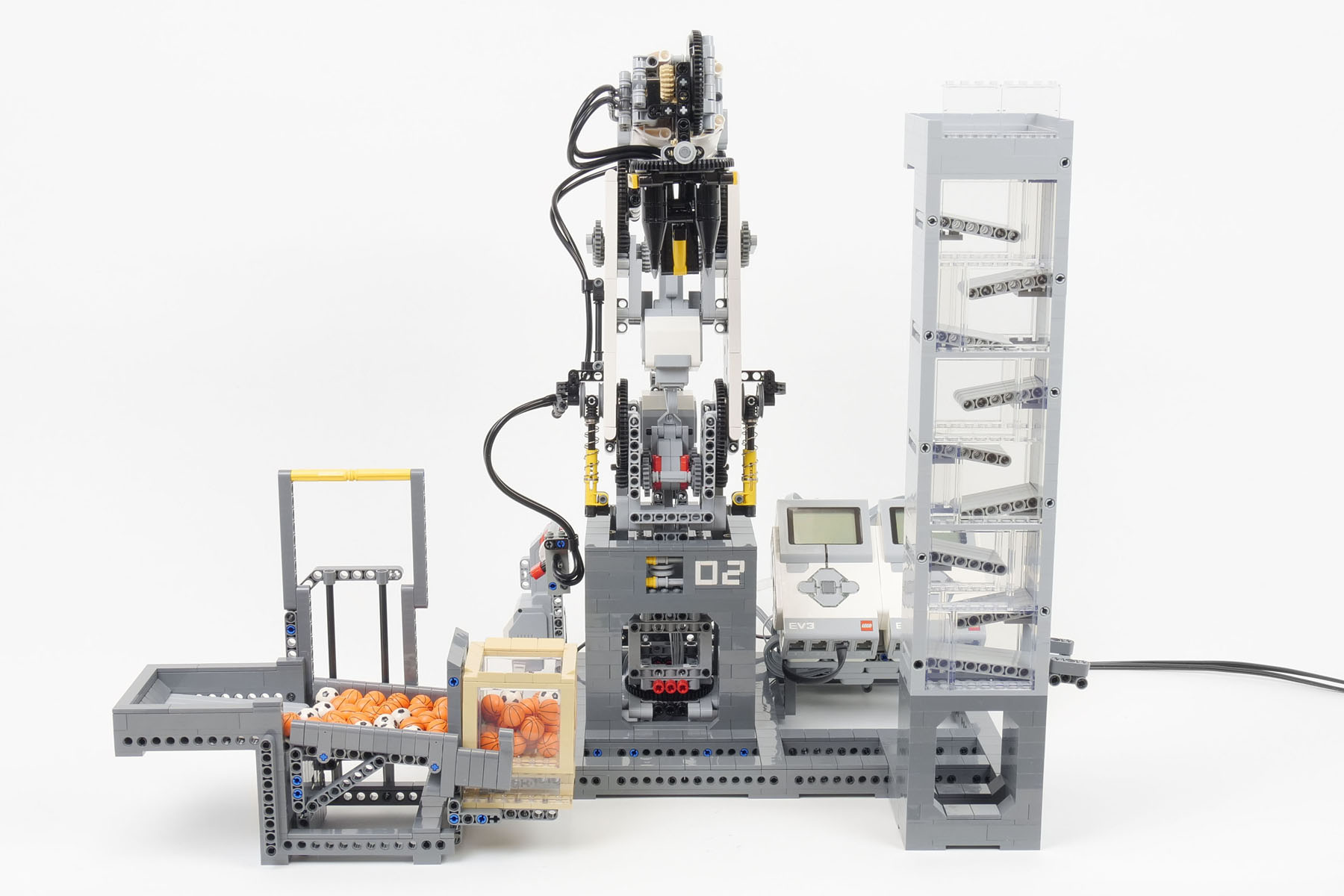
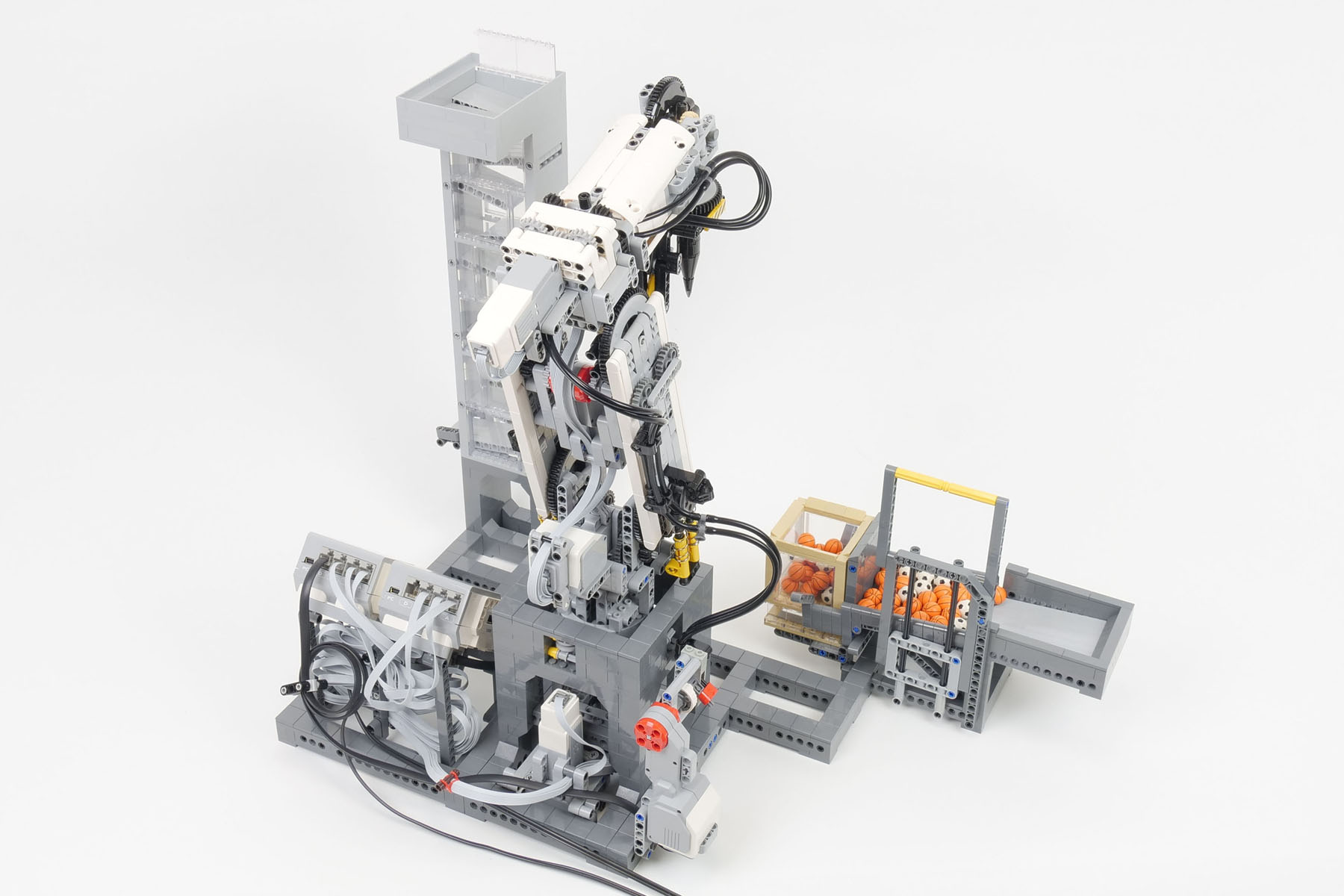
I made a great ball contraption (GBC) module using a robot arm. The Type V760 robot has been upgraded, and information on the robot itself is provided here.
The robot moves the container, and also moves the ball into the container by lifting a yellow bar. The robot carries one container with 30 balls in 28 seconds, a processing speed that barely meets the 1 ball/sec standard.
Because this module is not for an exhibition, but for a video presentation, I have left the ball either stuck or unstable. While this has not been tested, I believe that if you move it for a long time, the position of the robot may shift, and this makes it challenging to display it as it is at exhibitions.