製作開始:2015年11月
完成:2015年12月
公開:2015年12月
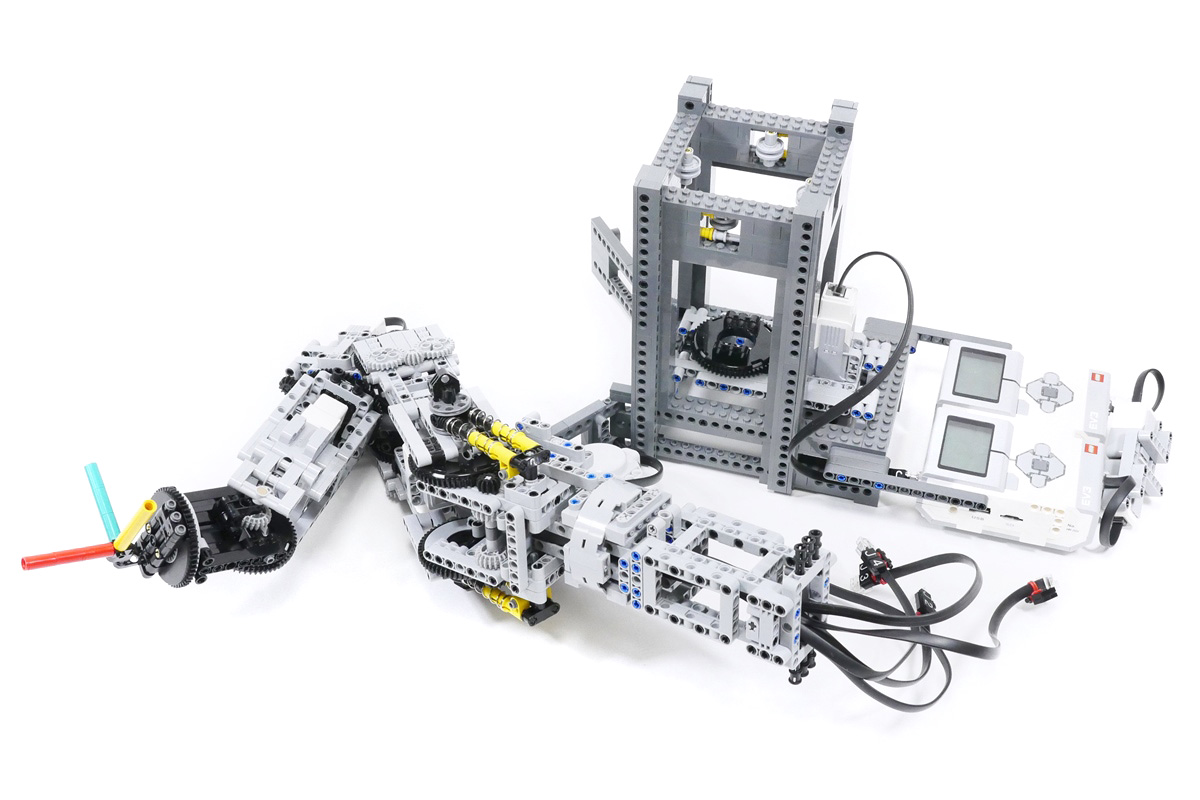
レゴマインドストームEV3を使って製作された6軸ロボットアーム(形式:V760)です。
V760は以前NXTで作った5軸ロボットS750の改良版です。S750は5自由度なので、任意の位置でハンドのとれる姿勢に制限がありましたが、このロボットは6自由度なのでハンドをどの位置にあっても自由な姿勢をとることができます。関節の構成は一般的な産業用6軸垂直多関節ロボットと同じです。

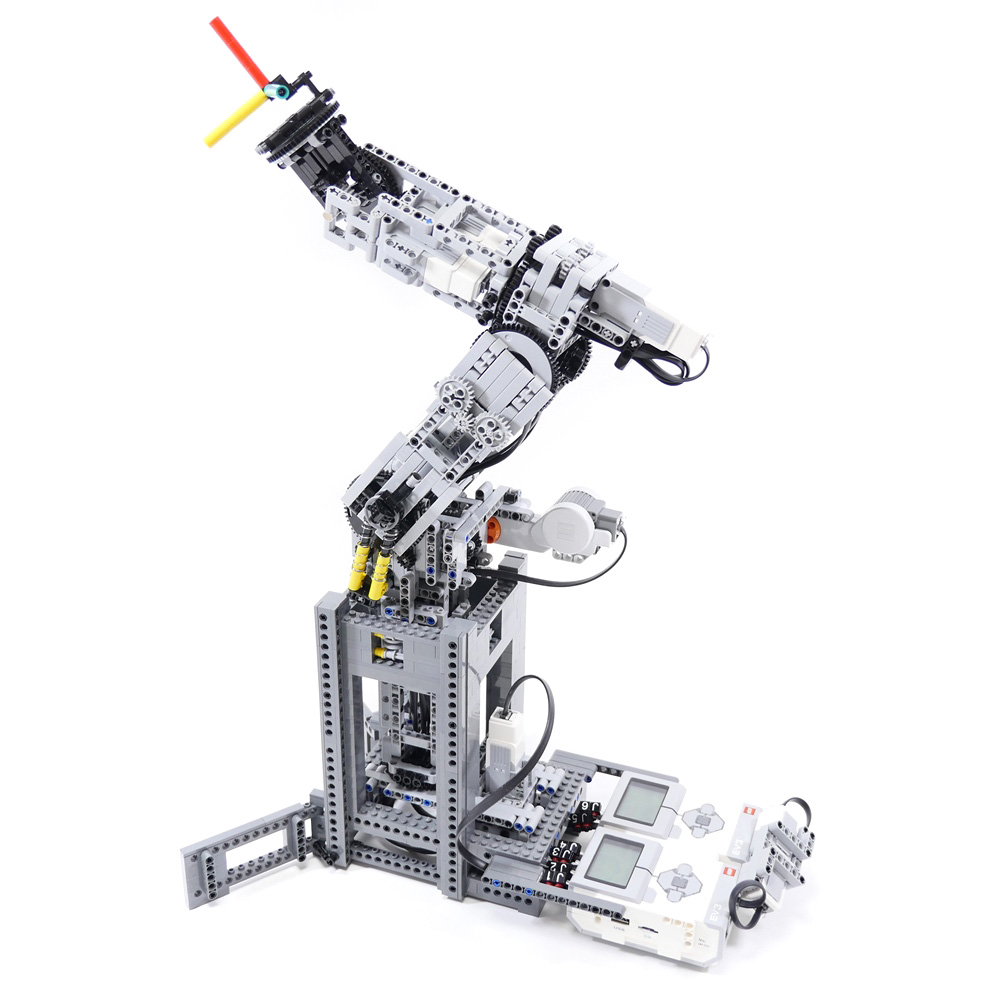
今回の製作では、全体をスリムに仕上げることを目標にしました。Mサイズのサーボモーター、60歯のターンテーブルなどの新しいパーツが手に入ったおかげで小さく作りやすかったです。バネバランサを一番力がかかる部分である第2関節にだけ使っています。わたしはいつもレゴの純正部品だけで作品を作ることにこだわっていますが、V760の製作では純正のケーブルが50cmまでしかなく長さが足りないのでHiTechnic社製のケーブルも使いました。
工夫した点は、旋回軸受の構造です。アームが水平姿勢をとる時に、旋回軸受には大きな曲げモーメントが加わります。1つのターンテーブルパーツだけでそのモーメントを負担するのは厳しいです。そこで、通常のターンテーブルパーツの軸受けに、4×4のマカロニパーツとローラーからなる軸受けを追加しました。この2つの軸受けがペアとなり、モーメントによって発生する応力を分散します。この構造により、モーメントに対する強さとロボットの腰回りのスリムな形状が両立できたと思います。
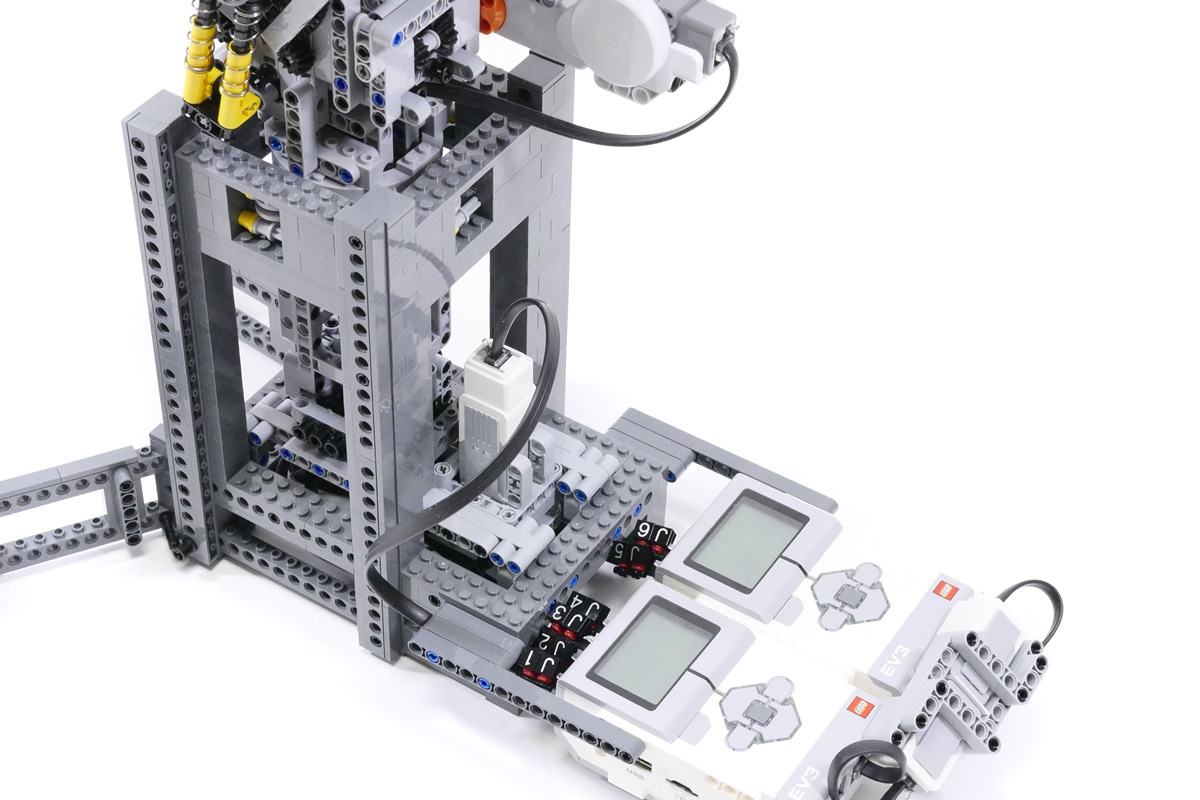
EV3で実行するプログラムはTOPPERS/EV3RTを使ってCで書いています。 2つのEV3間の通信はUSBかBluetoothで行いたかったのですが、まだできていません。現在は一時的な解決法ですが、2つ光センサーを使い2台のEV3に同期信号のやり取りをさせています。EV3はリアルタイムでロボットの逆運動学を計算していて、ハンドの目標位置と目標姿勢から、ロボットの各関節の角度を導いています。動画のデモで、ハンドの移動には異なる2種類の動き方を設定しています。1つは直線補間動作で、ハンドが移動する軌跡は直線を描きます。もう1つは関節補間動作で開始地点と終了地点だけを指定した動きで、軌跡は直線を描きません。
2番目の関節の駆動にEV3のLモーターではなくNXTのモーターを使っているのは、NXTのモーターの方がEV3のLモーターよりモーター内部のギヤバックラッシュが小さく精度が良いからです。
今後としては、ロボットの先端にチャックを取り付けてマテハンができるようにする予定です。