製作開始:2018年11月
完成:2018年12月
公開:2019年2月

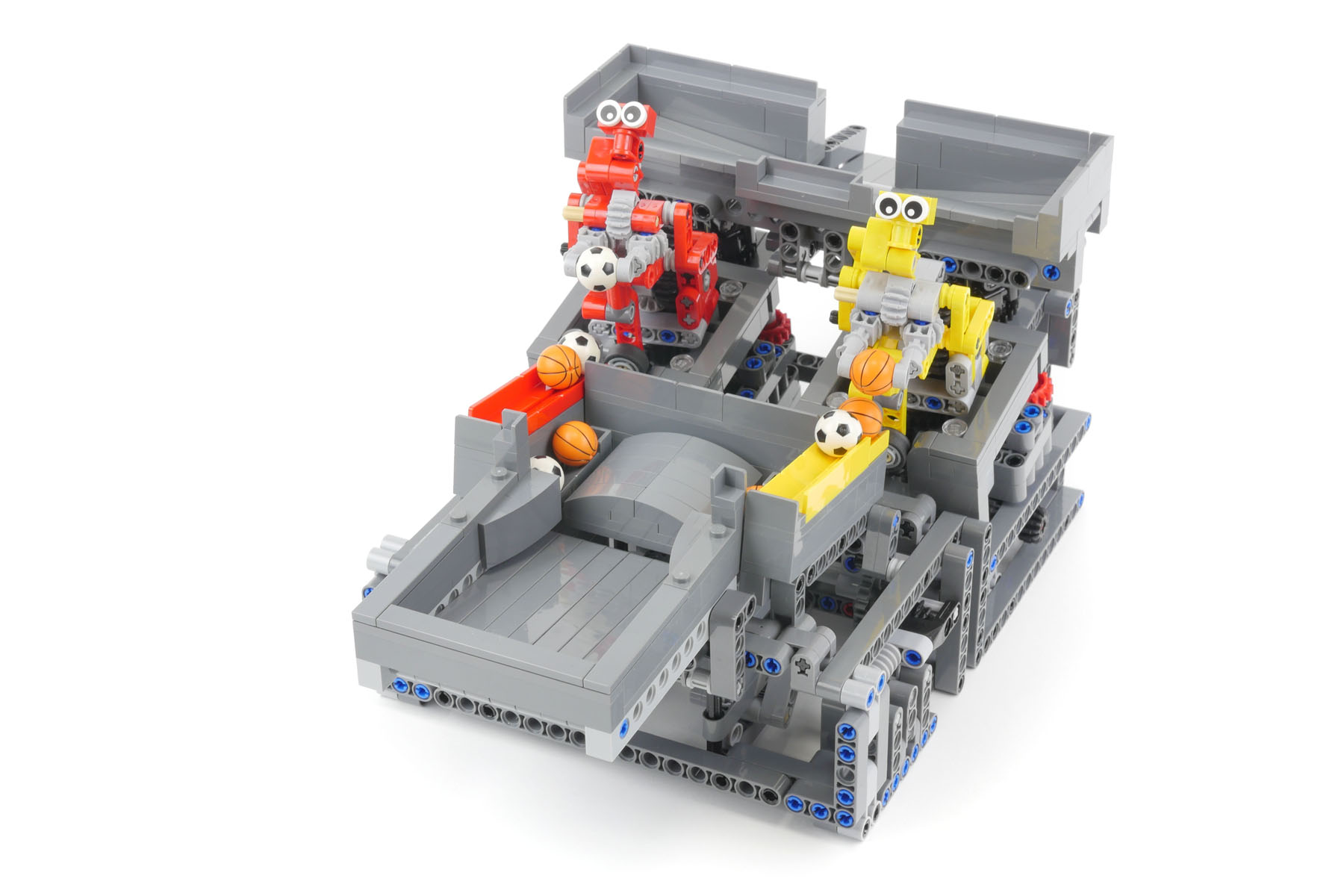
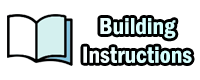
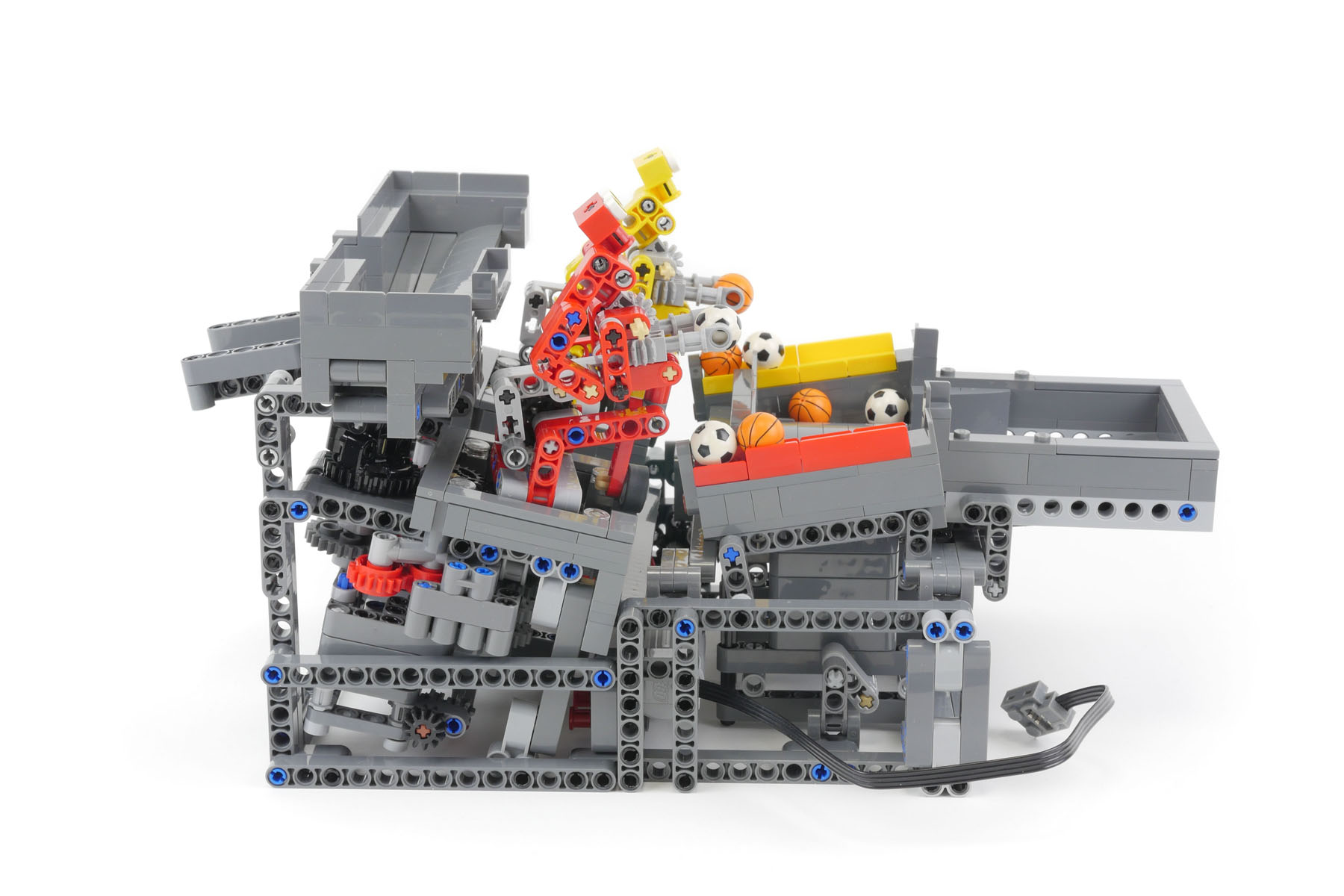
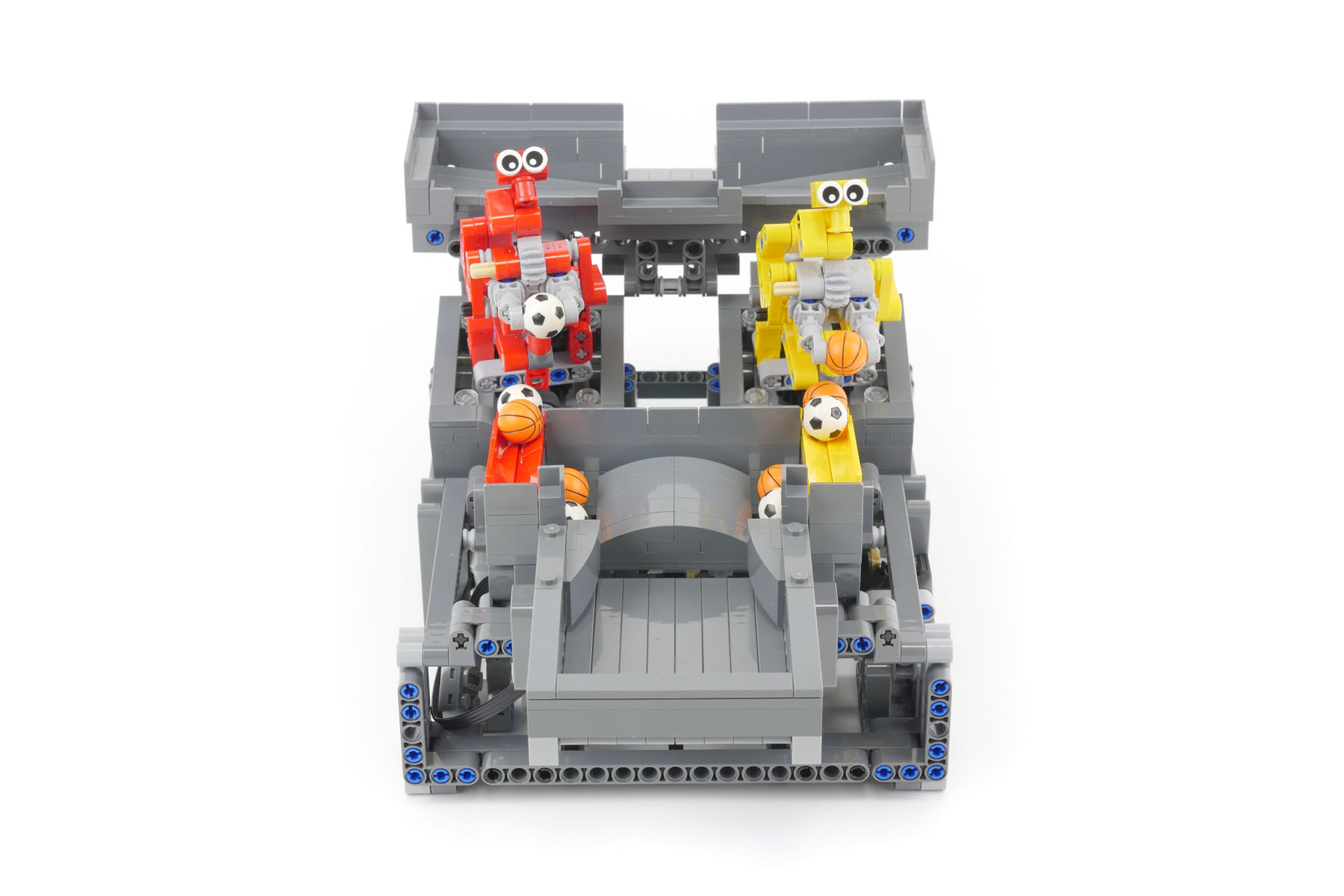
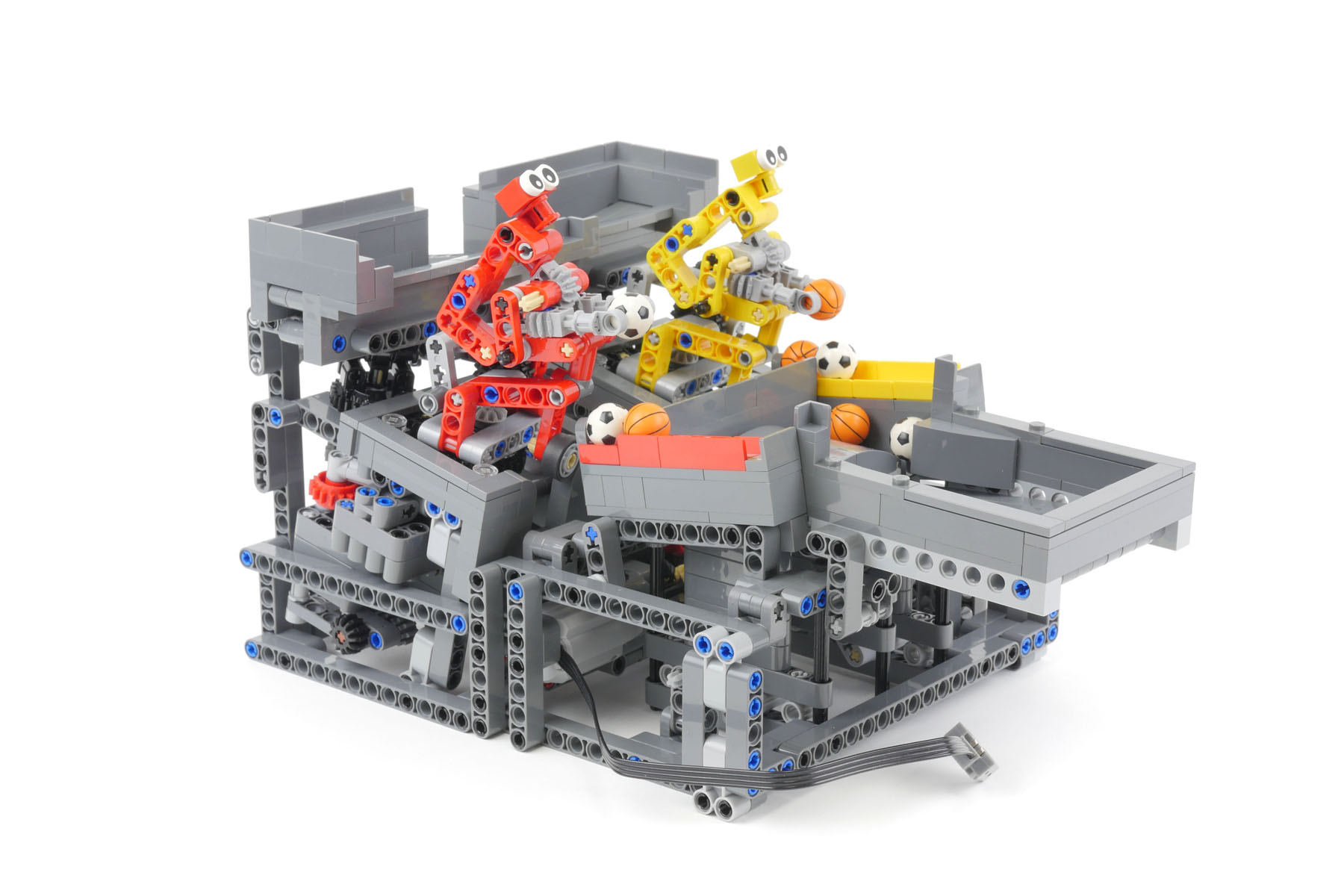
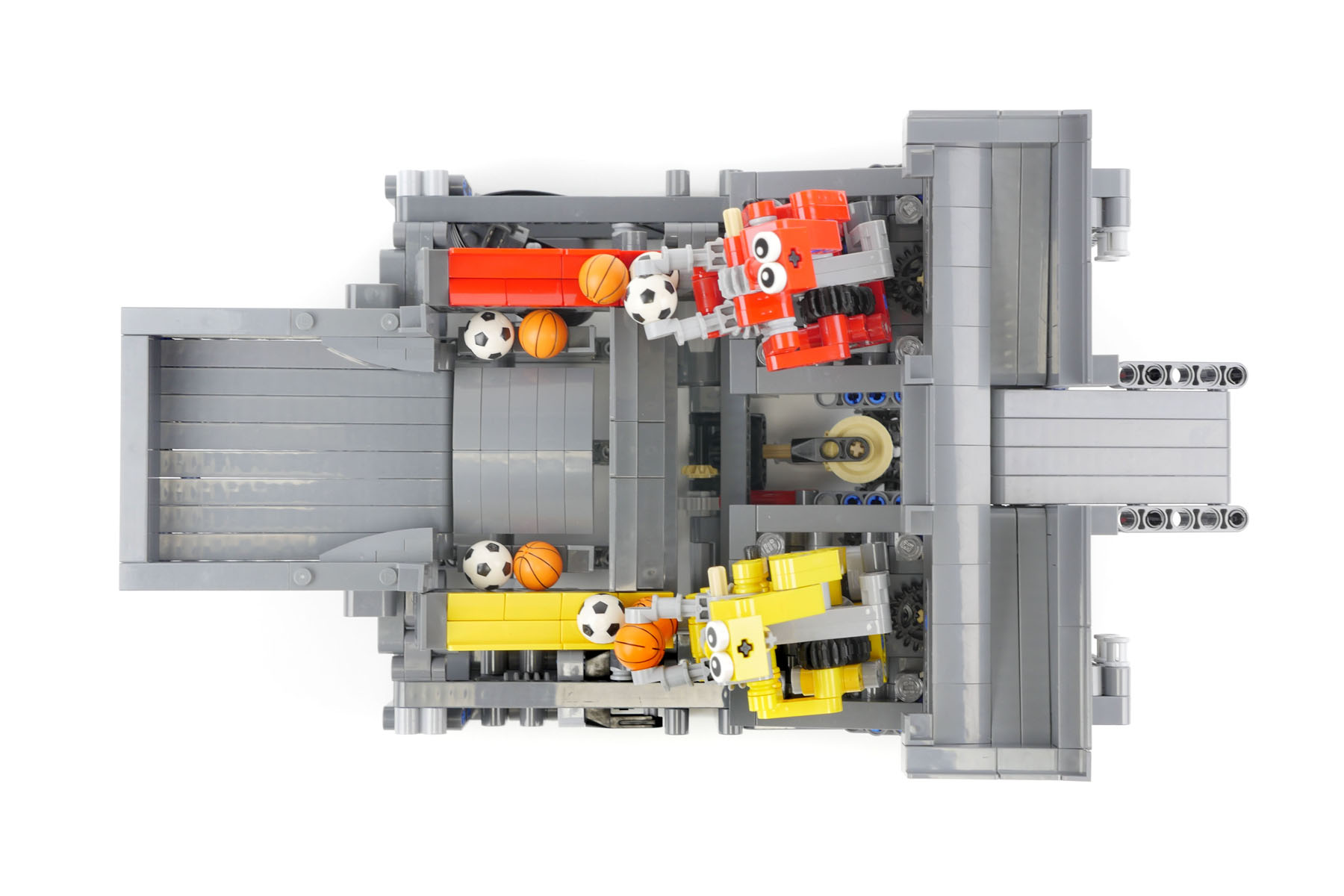
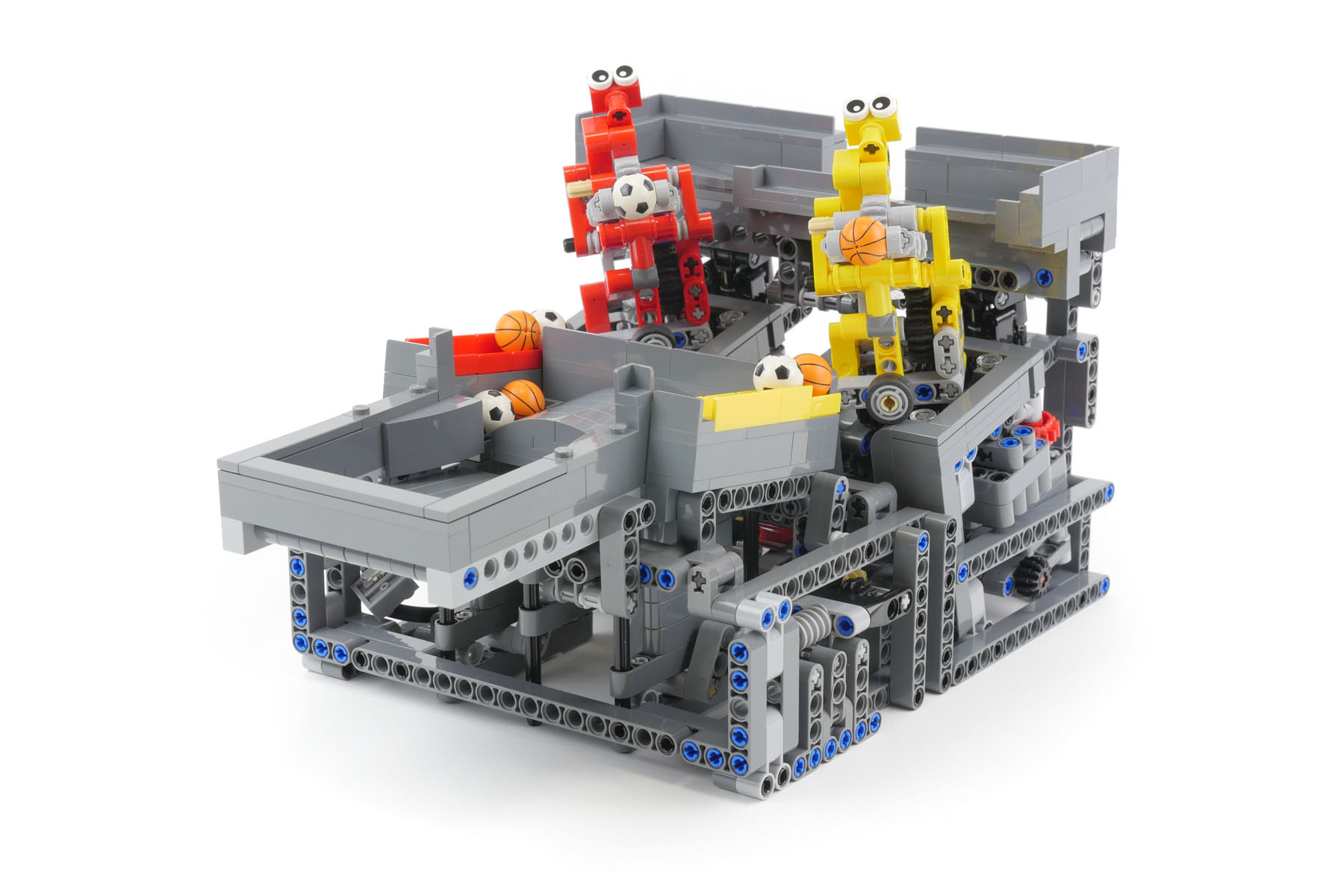
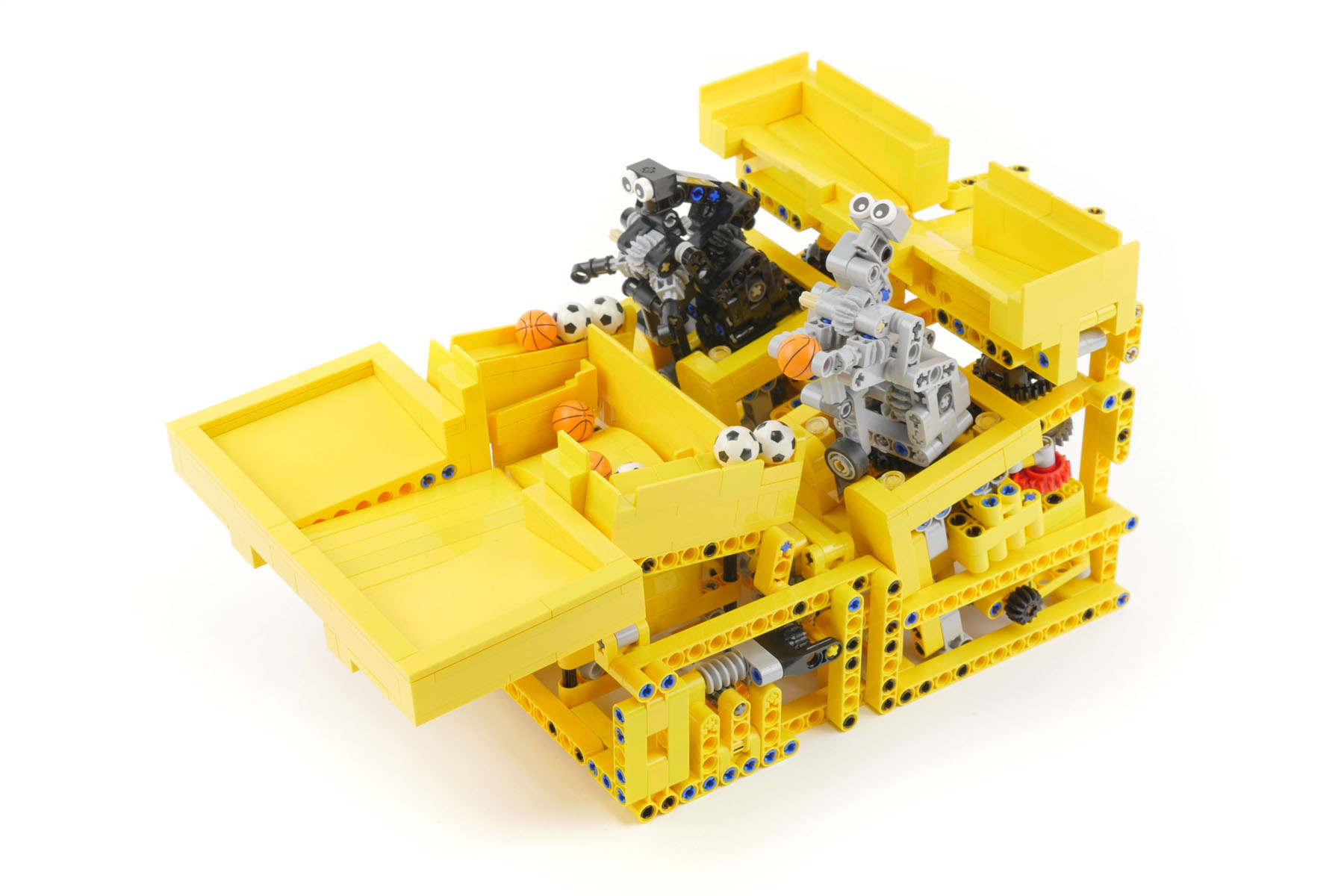
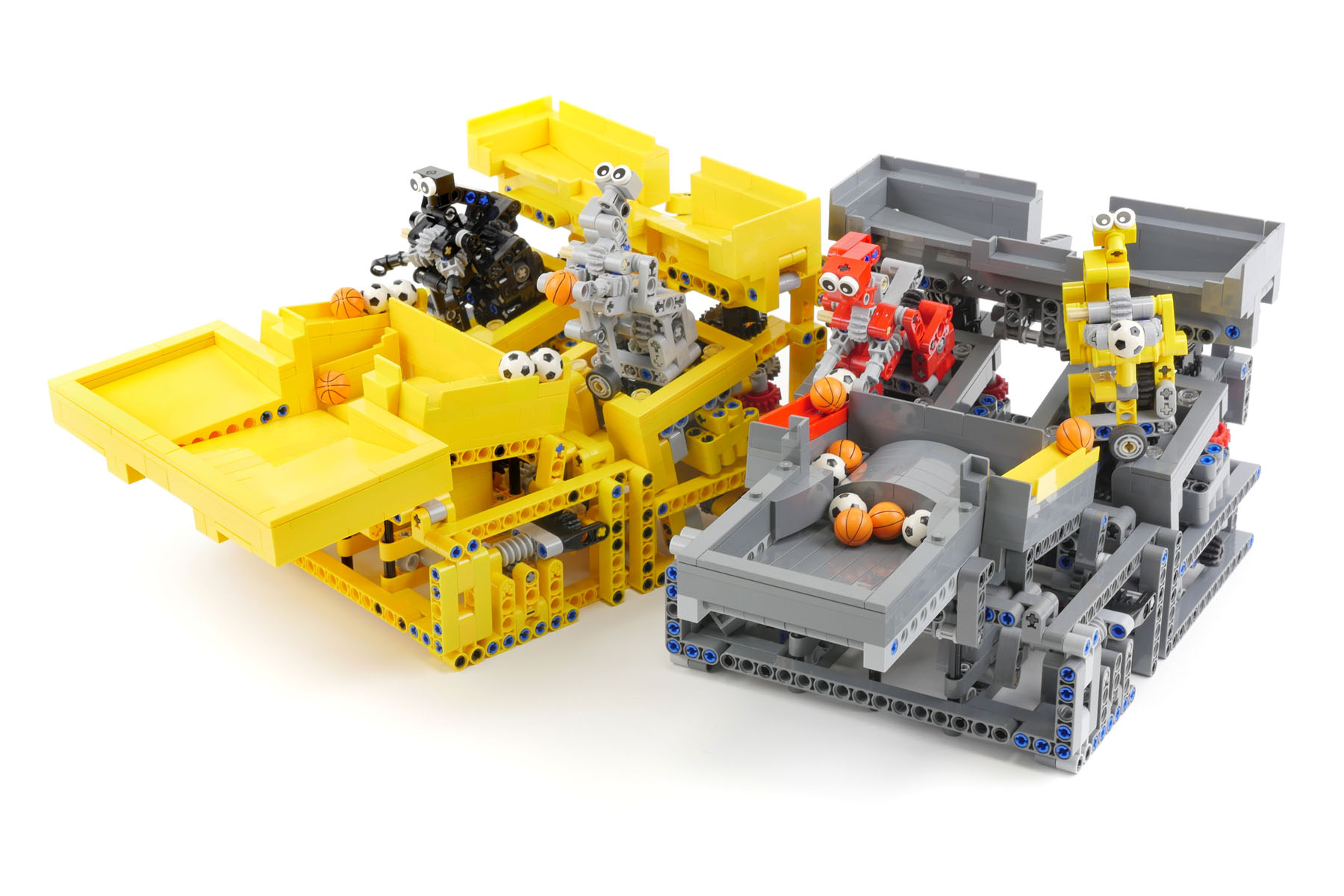
この新しいGBCモジュールでは働き者の2体の小さなロボットが腕を左右に振ってボールが来るのを待っています。ロボットは前に転がってきたボールをつかむと、素早く後ろ向きに回転してボールを放り投げます。このロボットは、ボールが来た時にだけボールをつかんで運ぶ動作を行います。つまり、ボールをつかむことが後ろを向いて投げる動作の引き金になります。ロボットが2体あるのは、規格の1ボール毎秒の処理速度を確保するためです。モジュールの入り口には入ってきたボールを2つのレーンに分ける階段式の供給部があります。今回のモジュールでも、全ての動作がモーター1つで行われています。

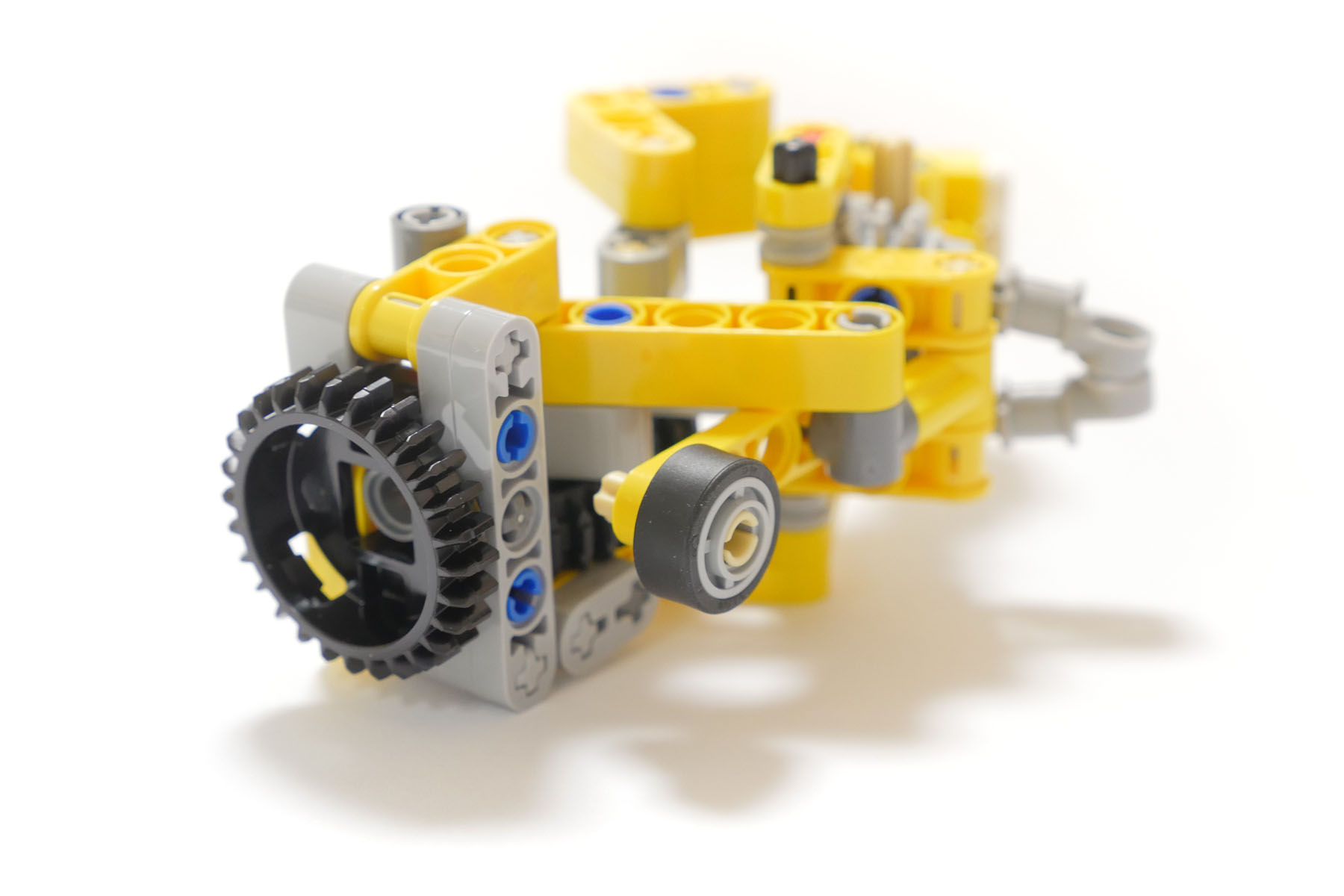
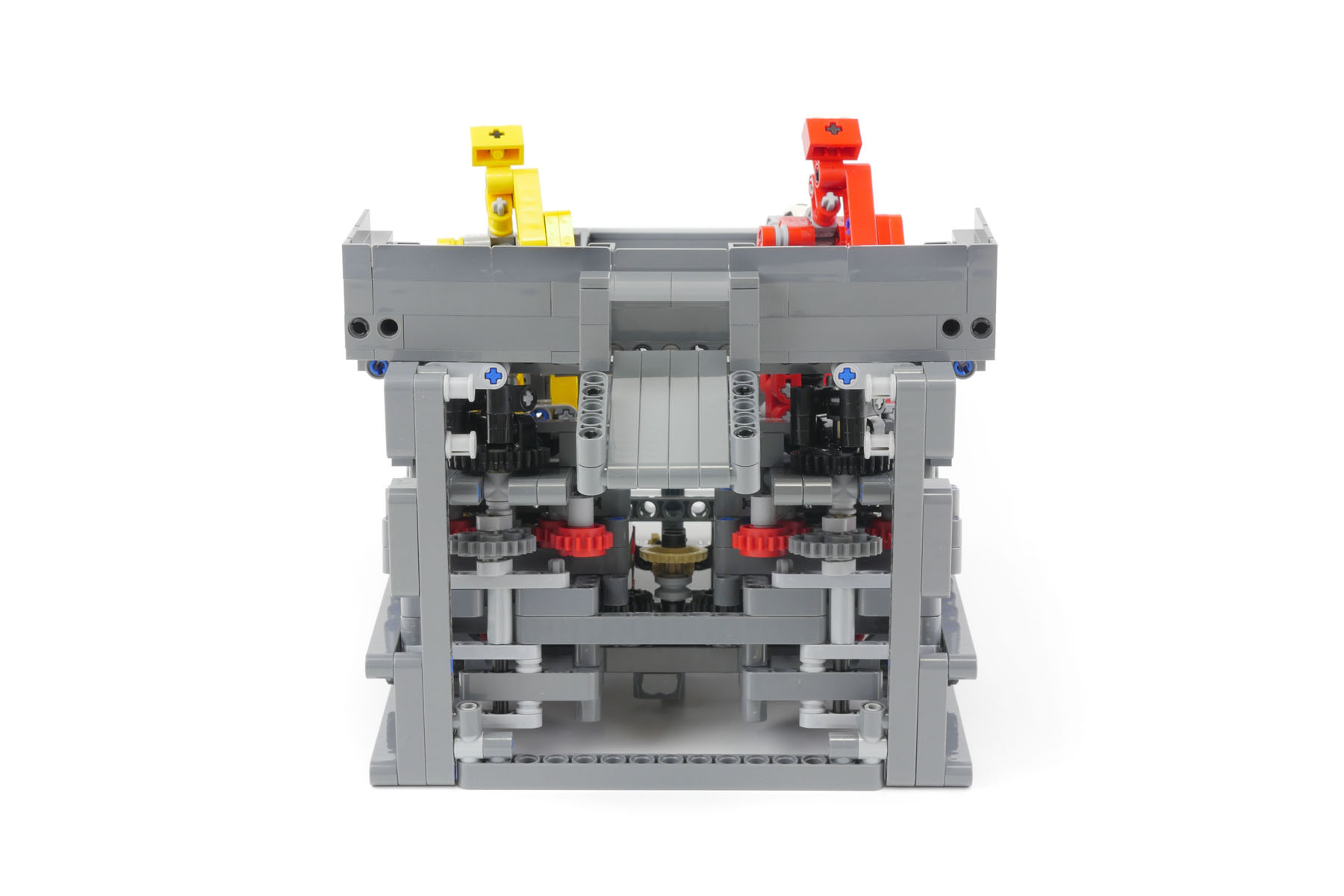
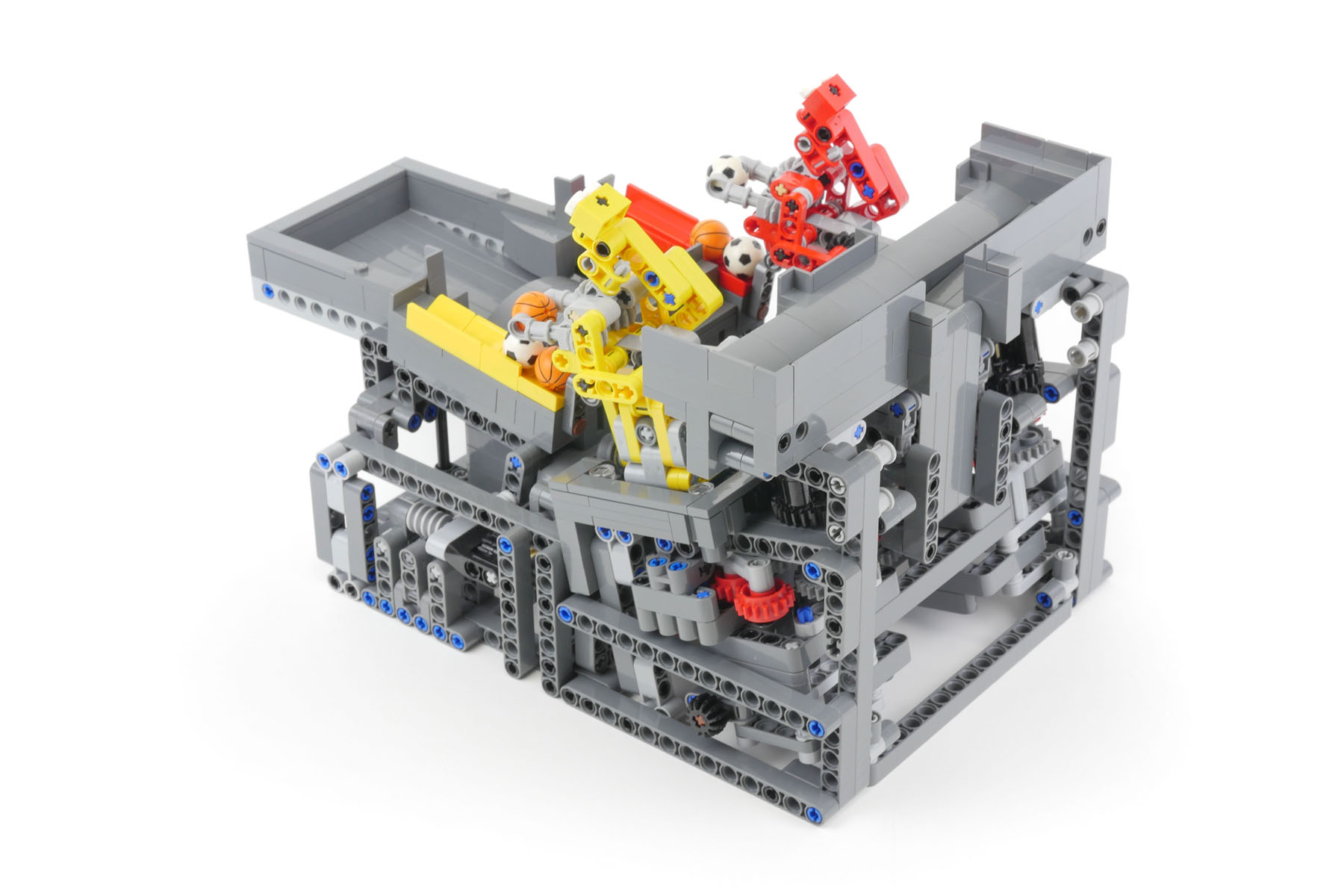
このモジュールは機構が複雑で、駆動部の摩擦による不具合が発生しやすいです。駆動部は摩擦が発生しない構造を目指して何度も作り変えました。28歯のターンテーブルは上下組み合わせて使用せずに、黒色の28歯ギヤの部分単独で使用しています。これはターンテーブルの摩擦による不具合を防ぐためです。当初はターンテーブルを上下組み合わせて使用していましたが、長時間動作させていると摩擦が大きくなり動作不良が発生しました。

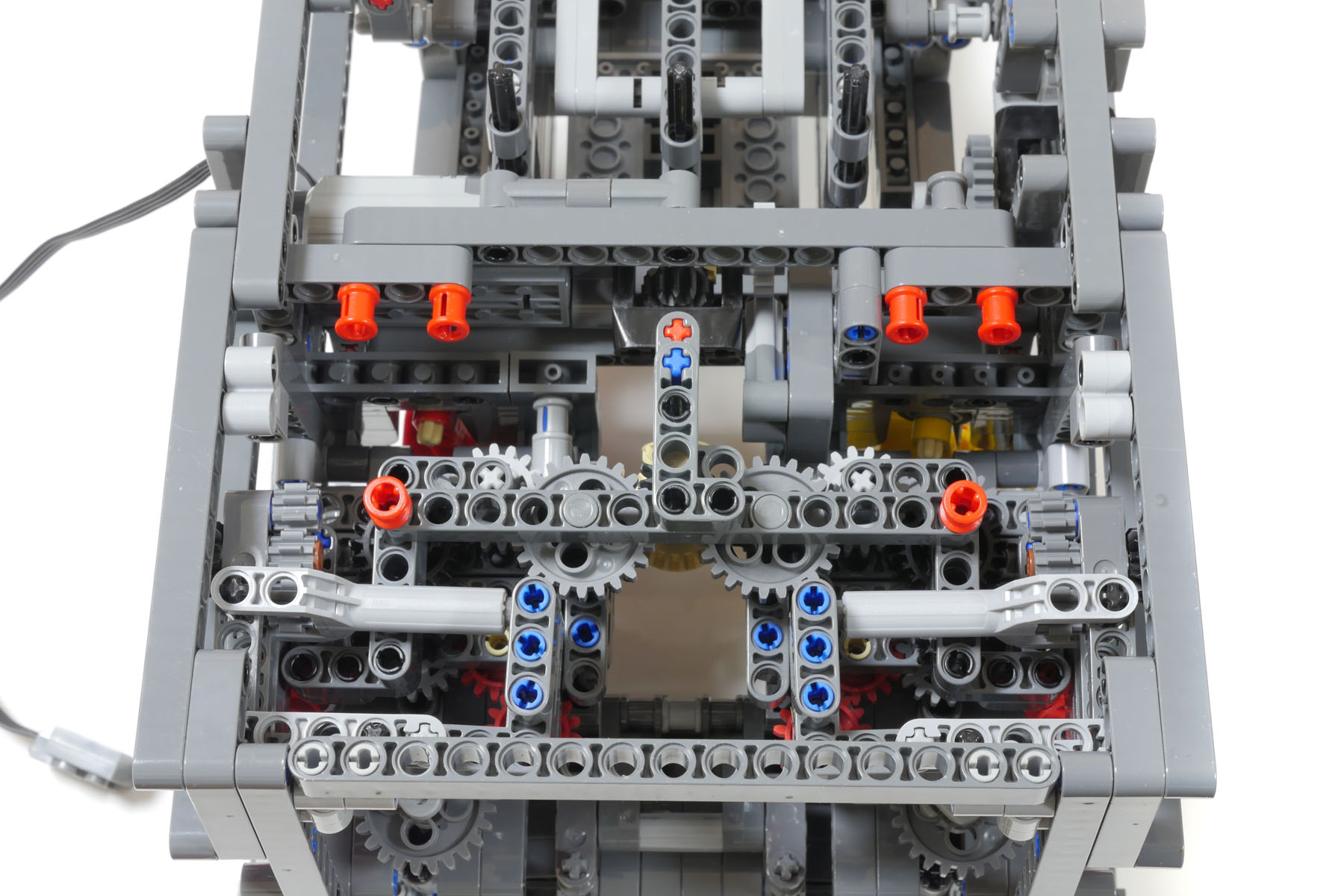
ボールをつかむ力はボールを運ぶ動作で不具合を起こさないために重要です。このモジュールでは、ボールをつかむ力をモジュールの左右にあるダイヤルで調整できるようにしています。組立後、ボールを運ぶ動作がうまく行えるよう、このダイヤルを調整する必要があります。今回のモジュールのフレームはこれまでよく用いていたテクニックブリックではなく、リフトアームで製作しています。このモジュールは比較的小さいのでこの構造で十分な強度があります。

GBCモジュール “Catch and Spin Robots”(組み立て説明書とキット)を作りたい場合
2023年12月までは本サイトでビルディングインストラクションを直接販売しておりましたが、
2024年1月より、販売を以下の提携Webサイトに移動します。今まではビルディングインストラクションのみの販売でしたが、パーツを含んだキットの販売も開始いたしました。
以下のリンクよりビルディングインストラクション・キットの購入をお願いいたします。