Started: April 2019
Completed: June 2019
Released: July 2019
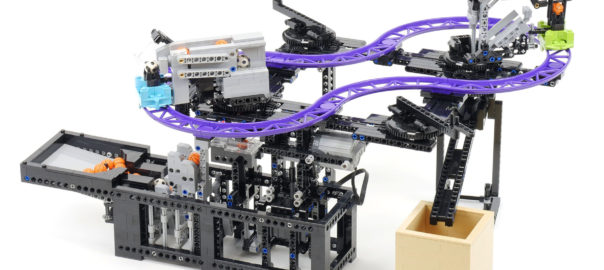
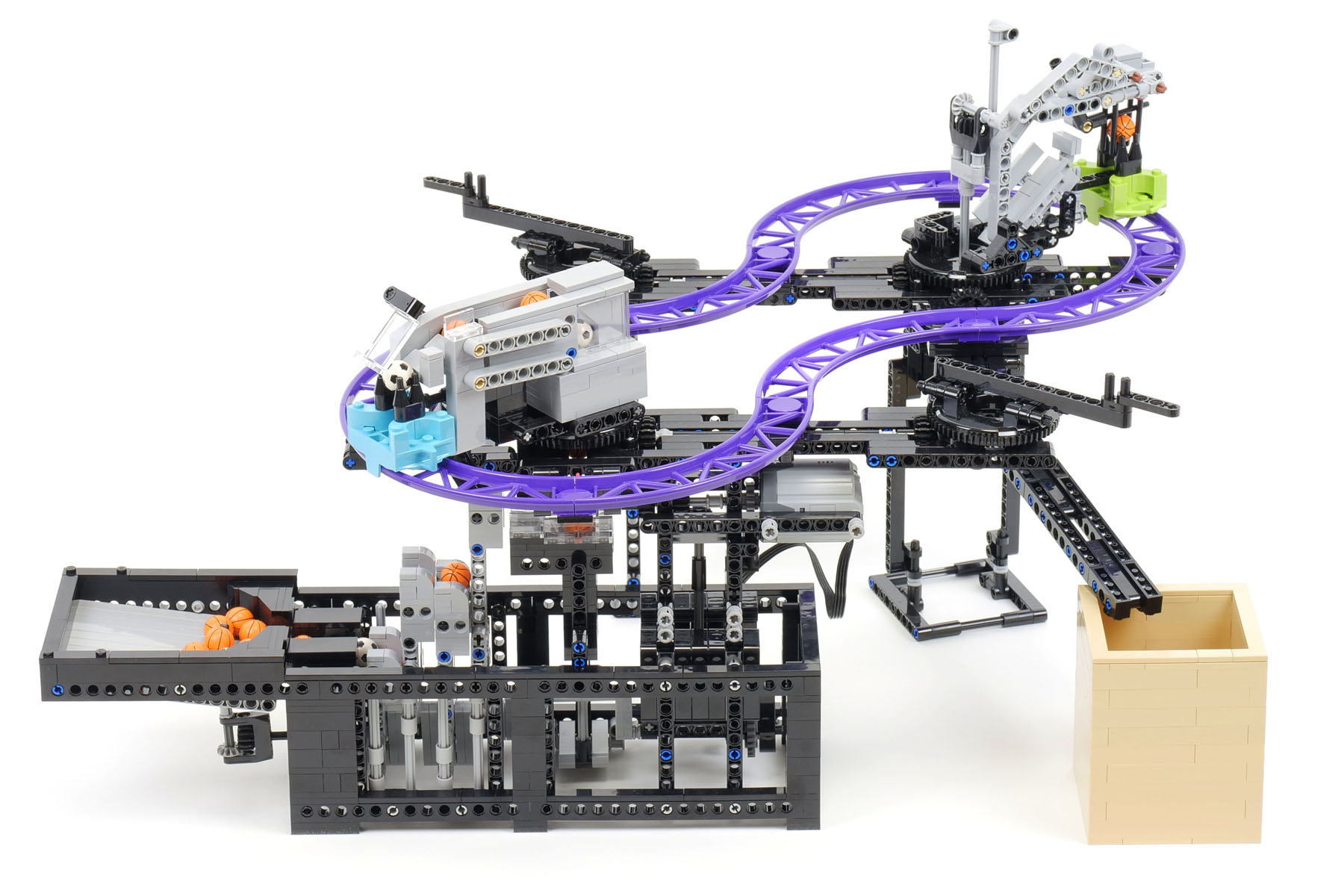
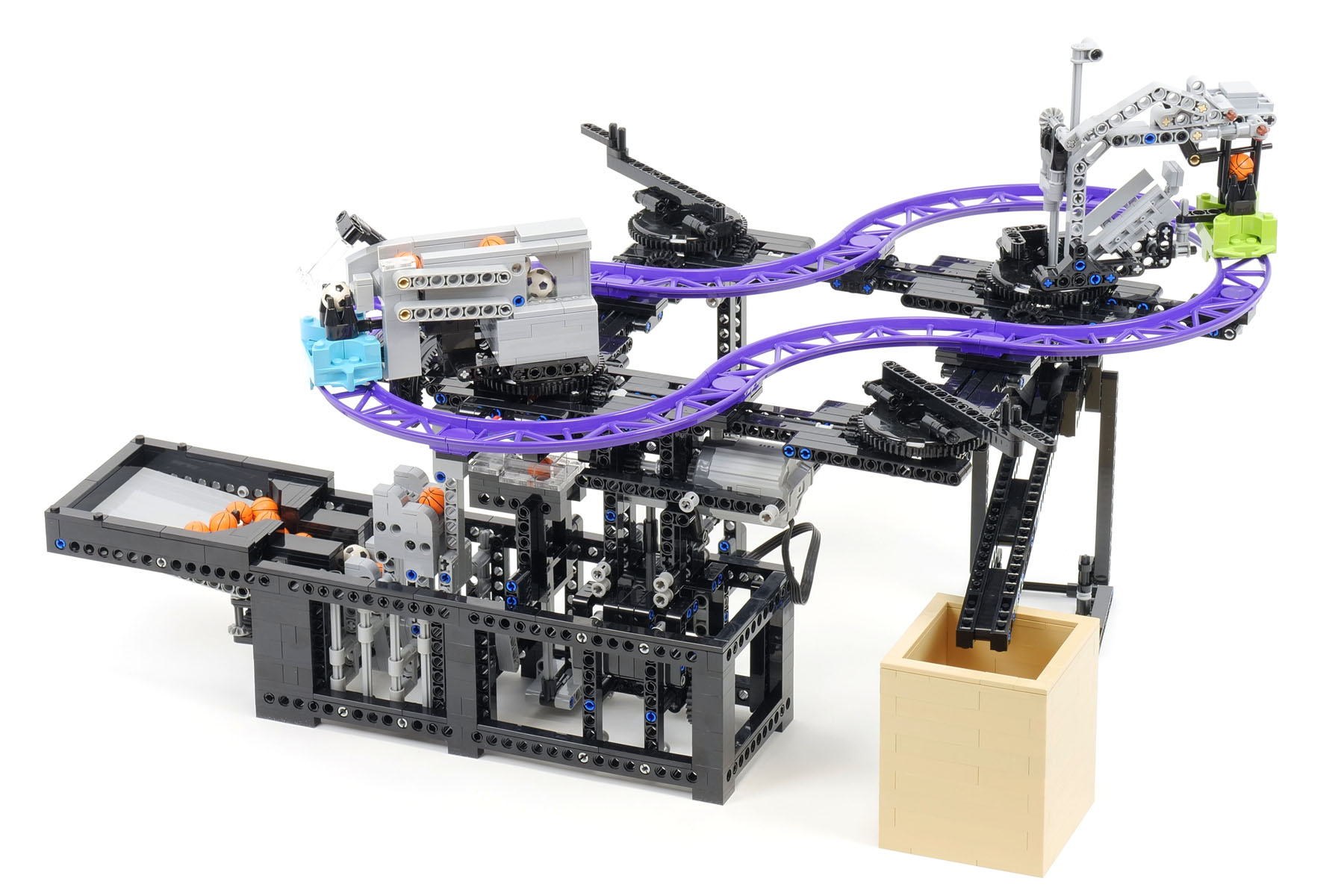
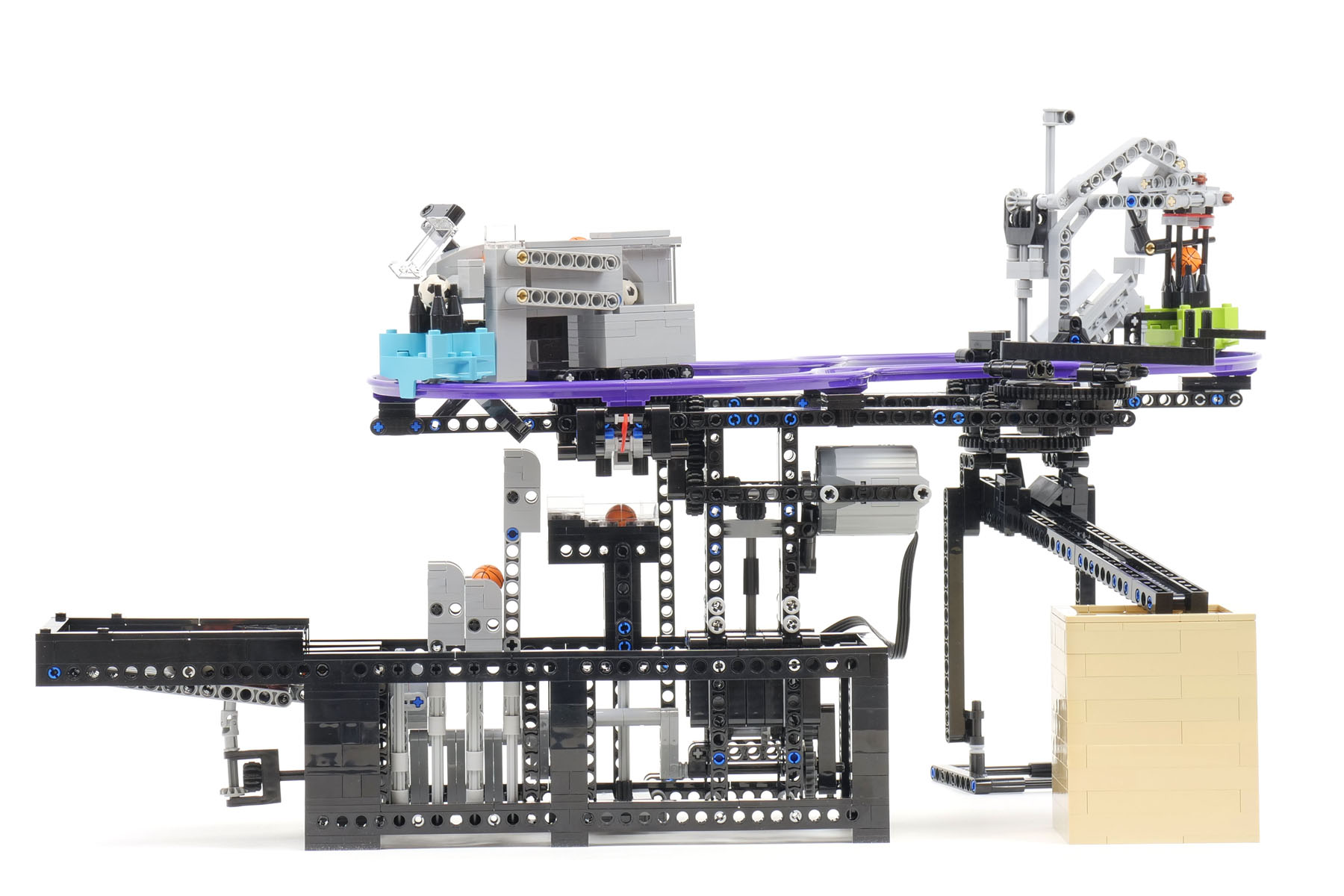
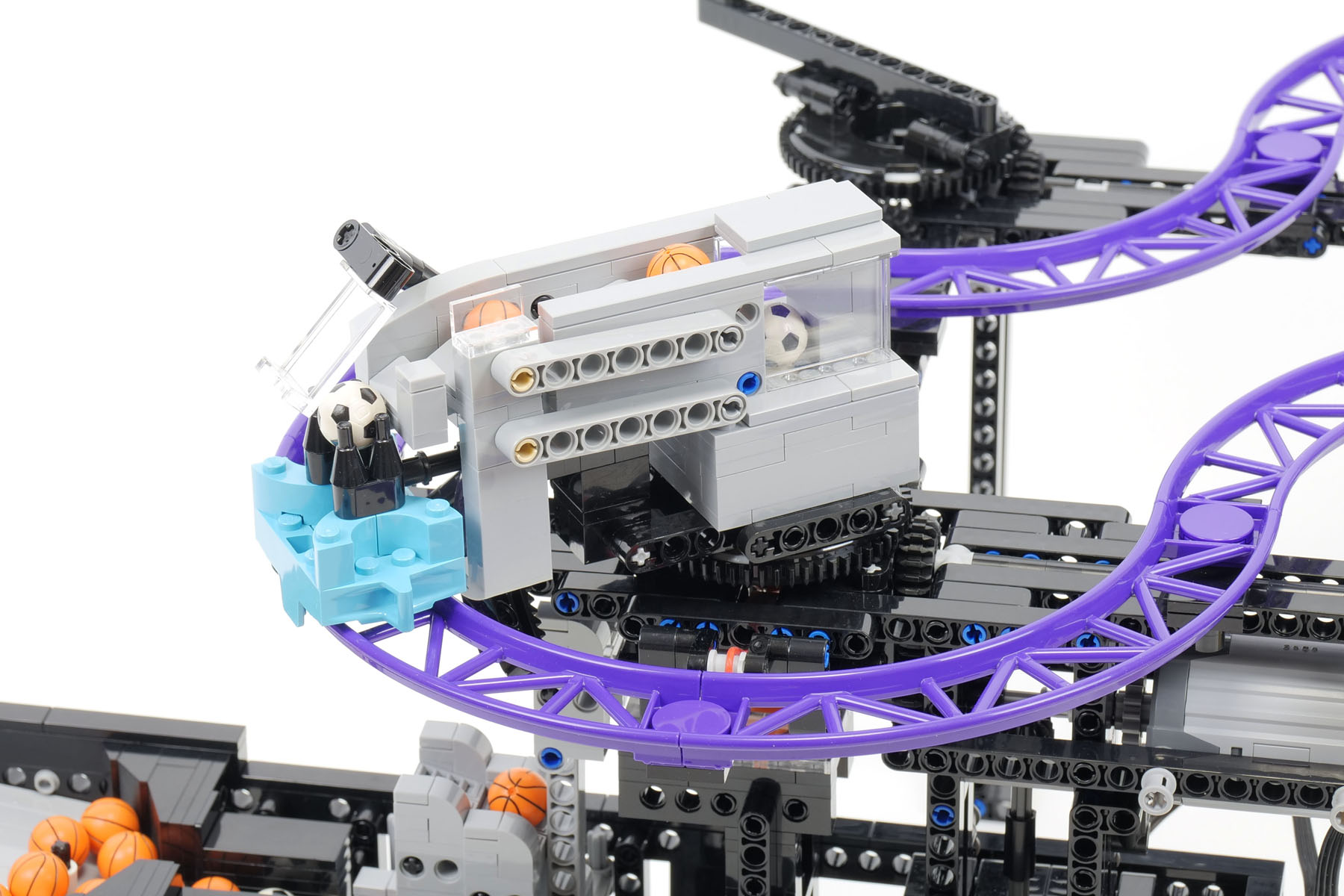
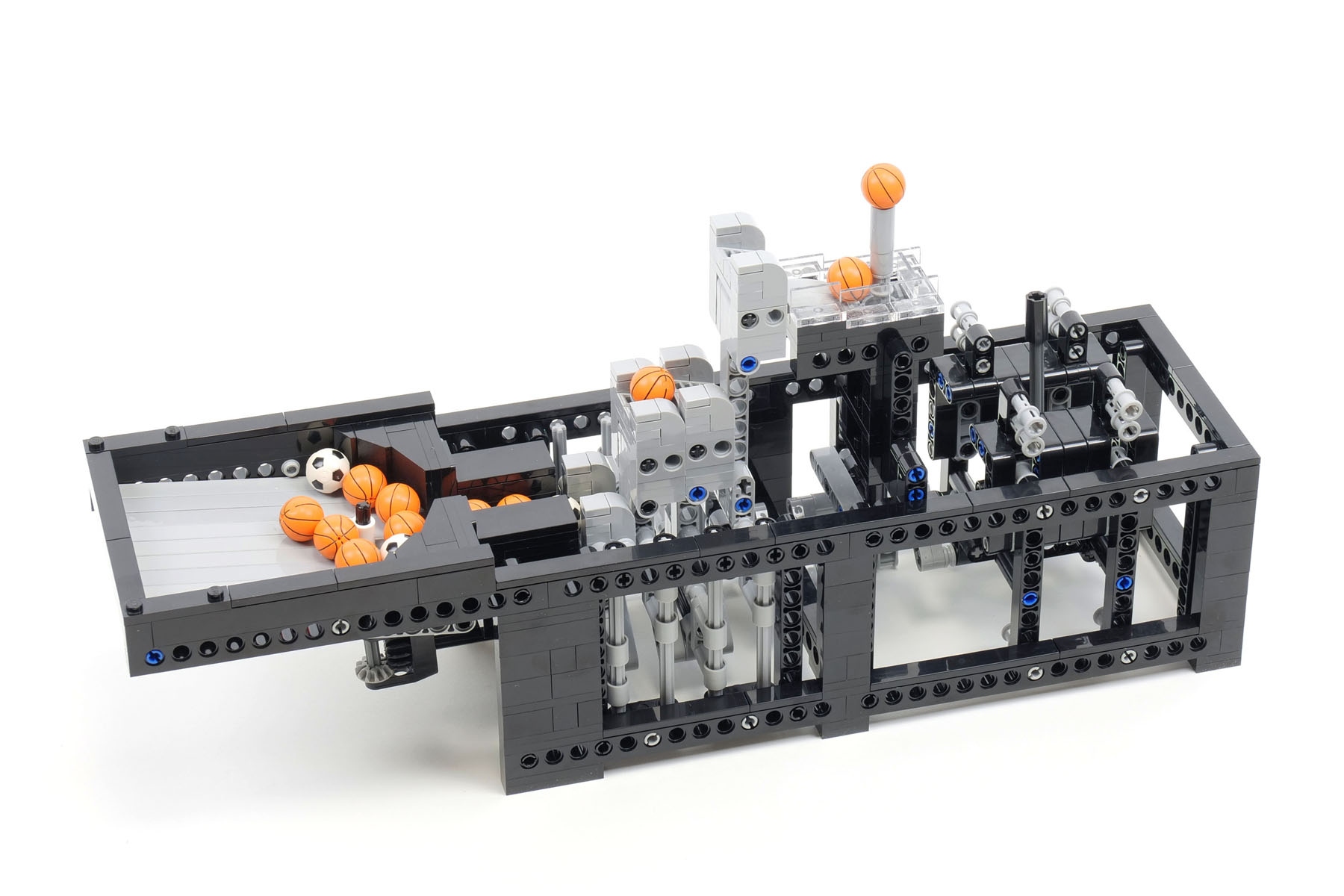
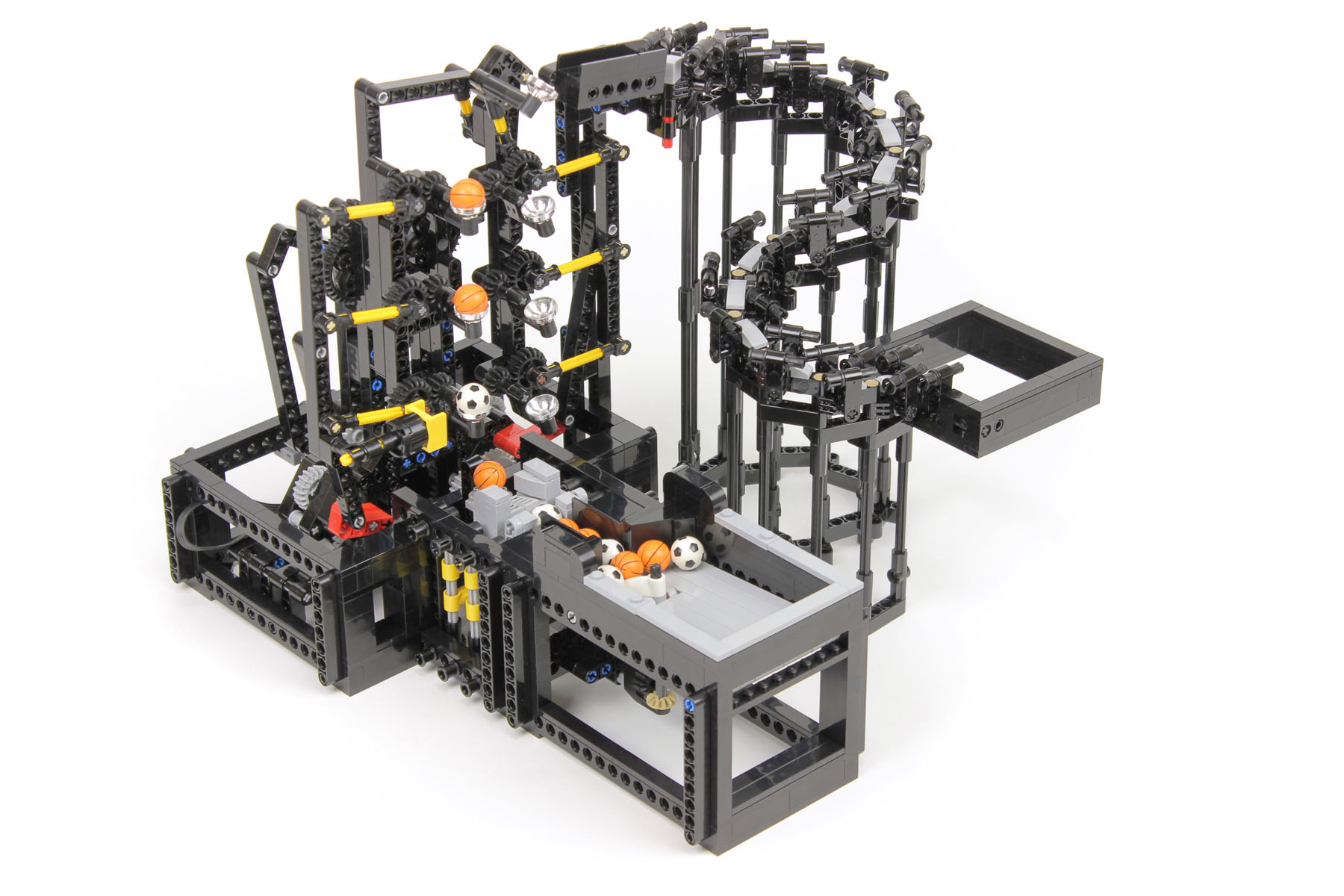
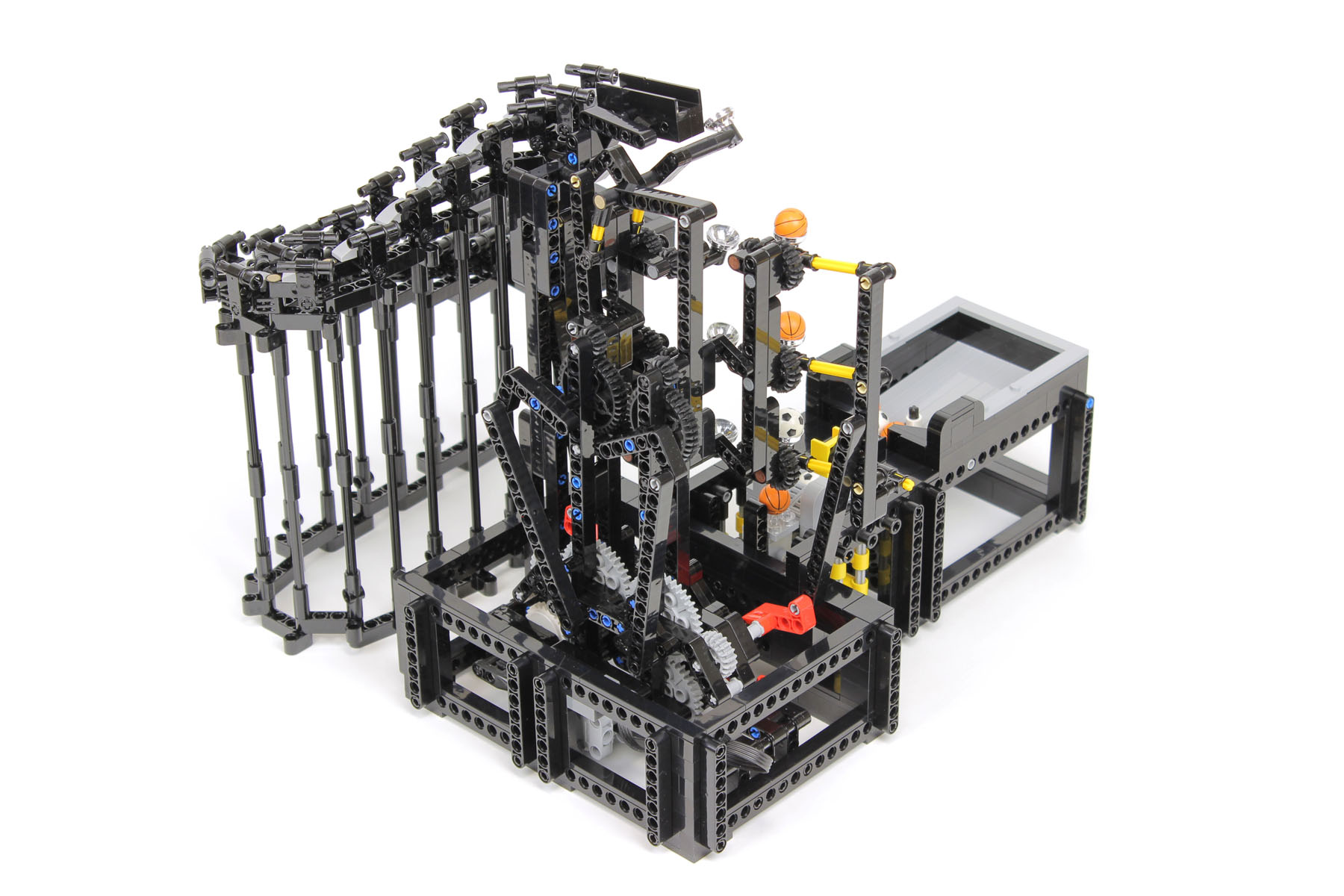
The GBC module Peanuts uses roller coaster parts, i.e., the roller coaster chassis and rails. The shape of the roller coaster rails looks like a peanut shell.
The process of making the module is shown in the following video:
As a point of caution, the large friction occurs in the sixty-tooth turntable. When the module is exhibited, the lubrication is necessary for the turntable,
If you want to build the GBC module “Peanuts”
Building Instructions were sold directly on this website until December 2023,
From January 2024, sales will be moved to the following affiliated websites. We have also started to sell kits that include parts as well as building instructions.
Please click on the links below to purchase building instructions and kits.
Started: February 2019
Completed: March 2019
Released: April 2019
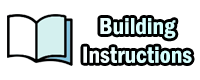
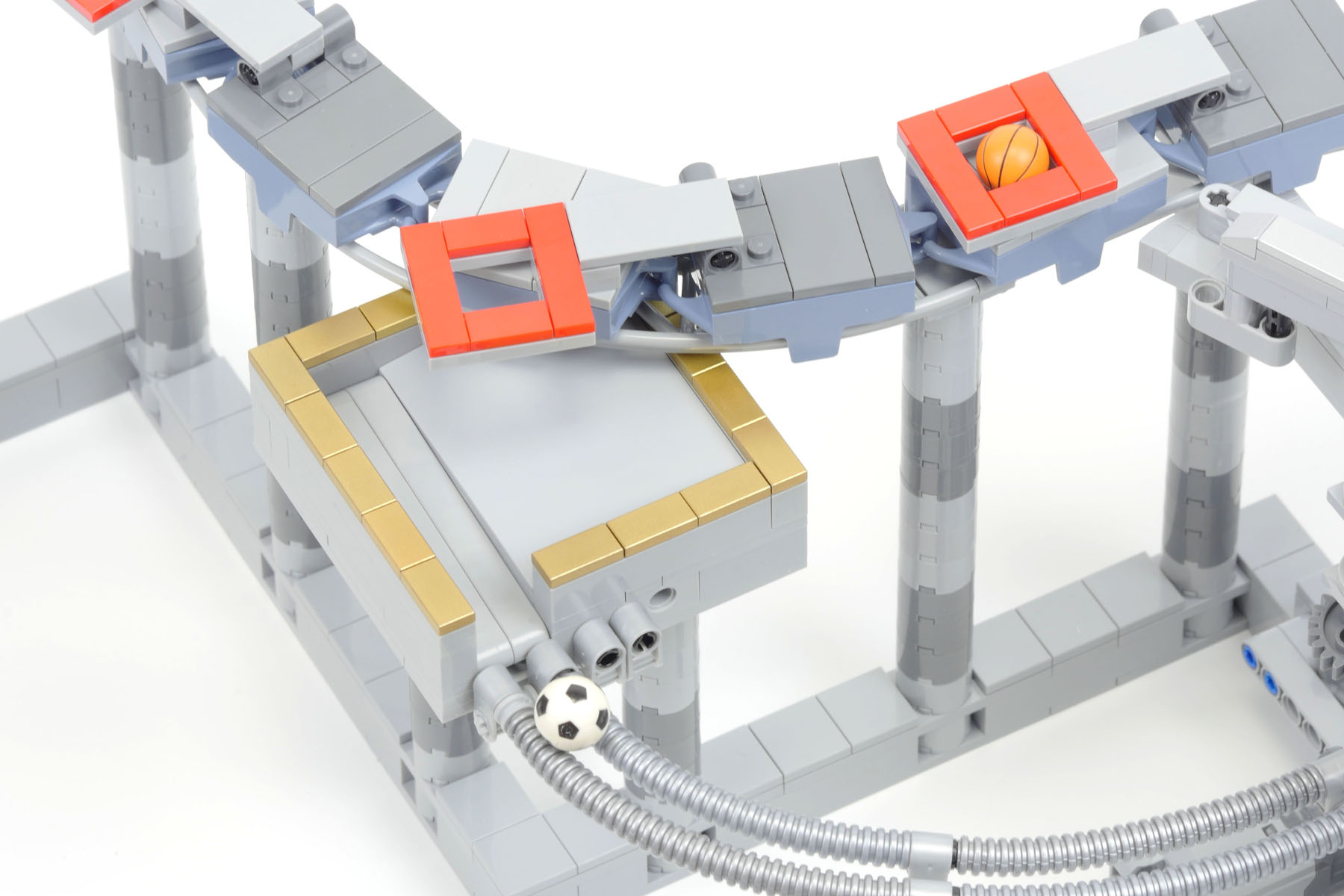
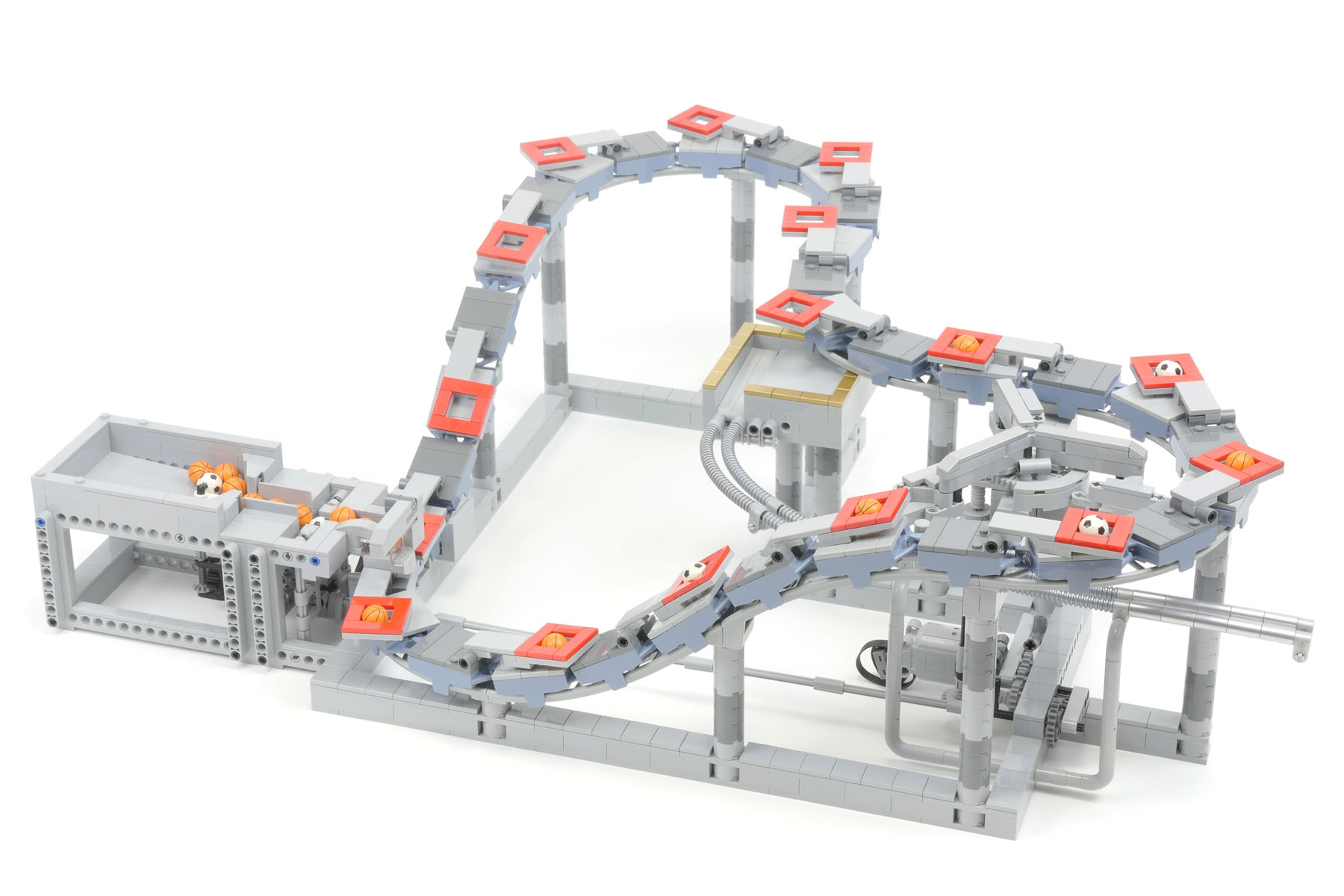
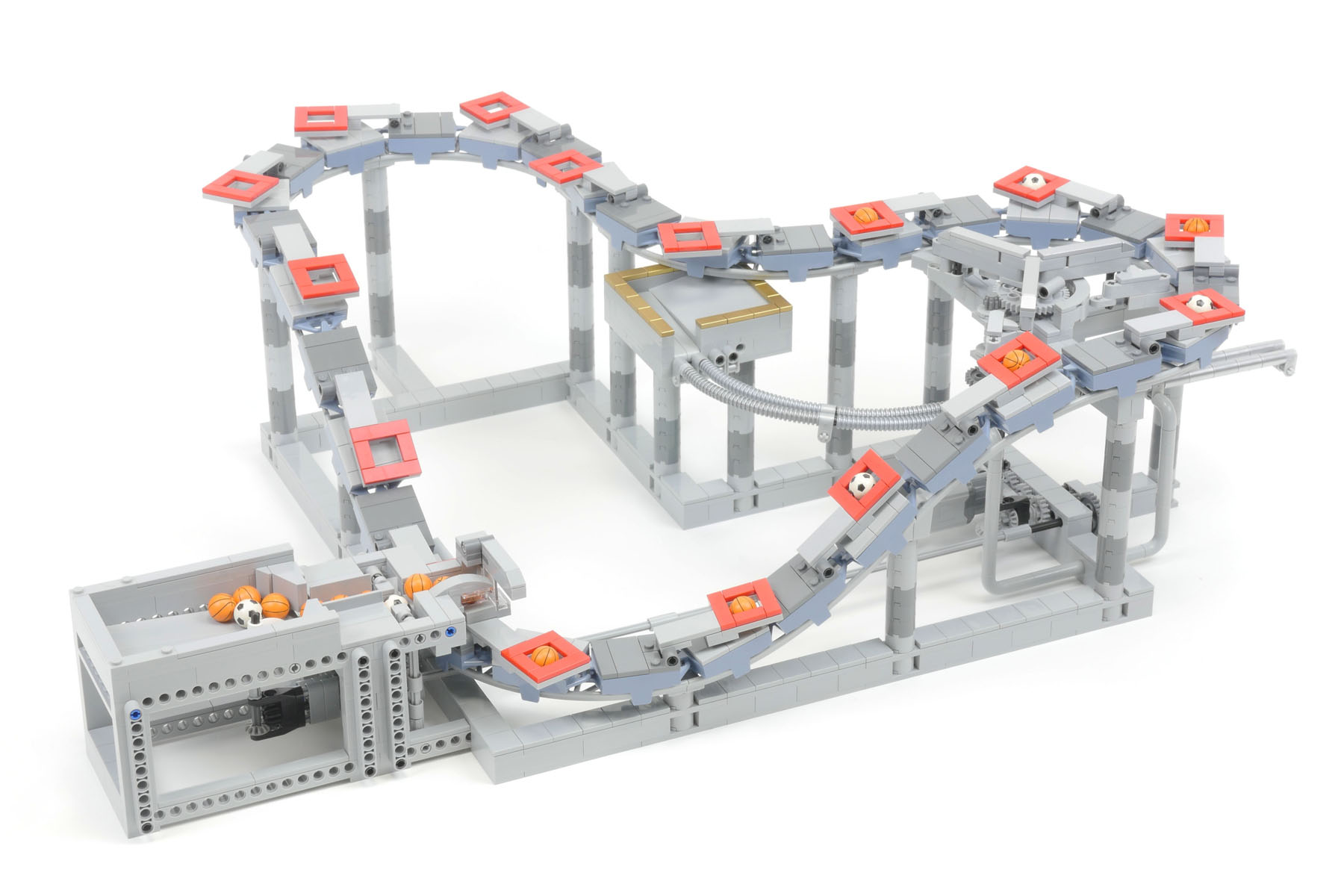
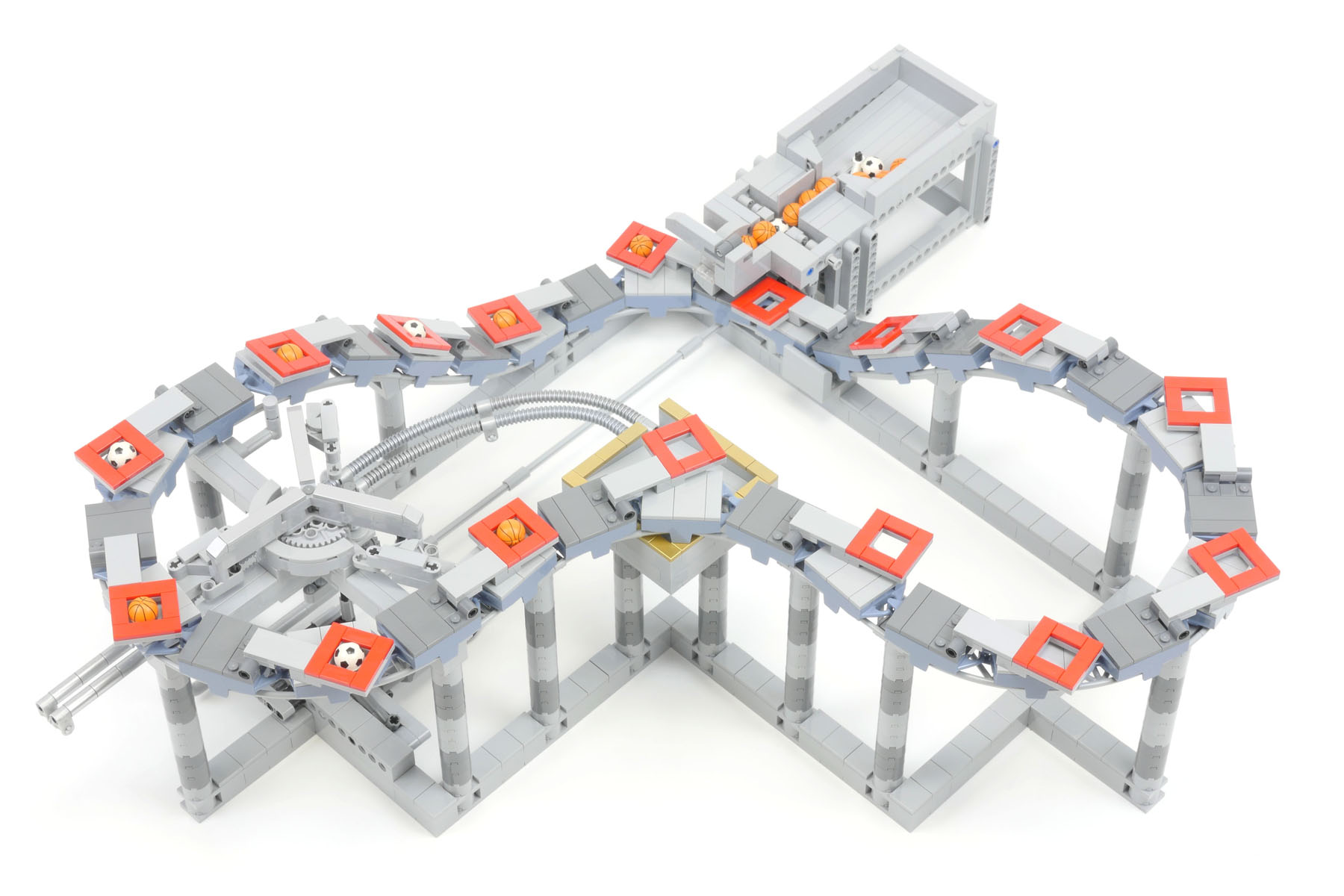
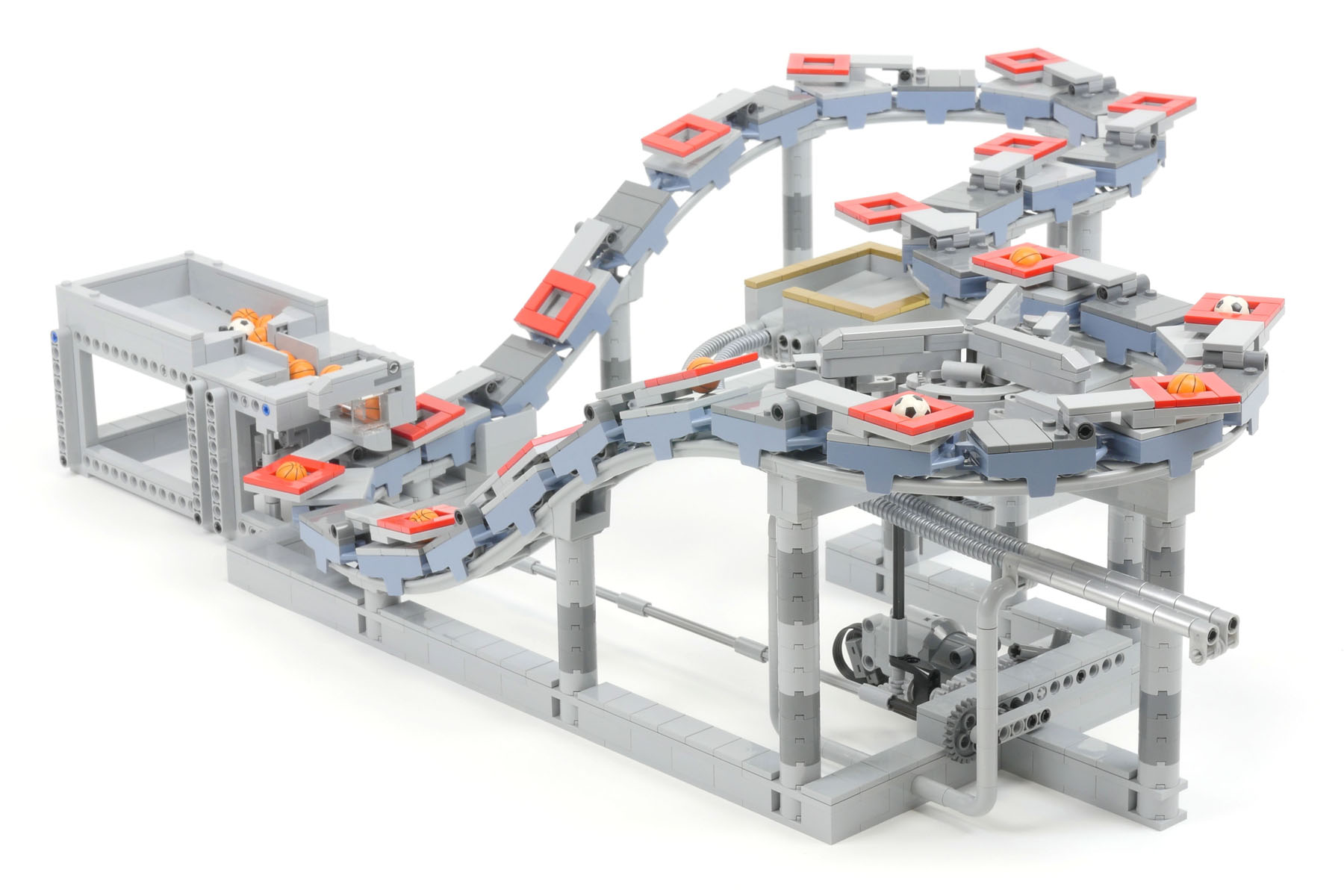
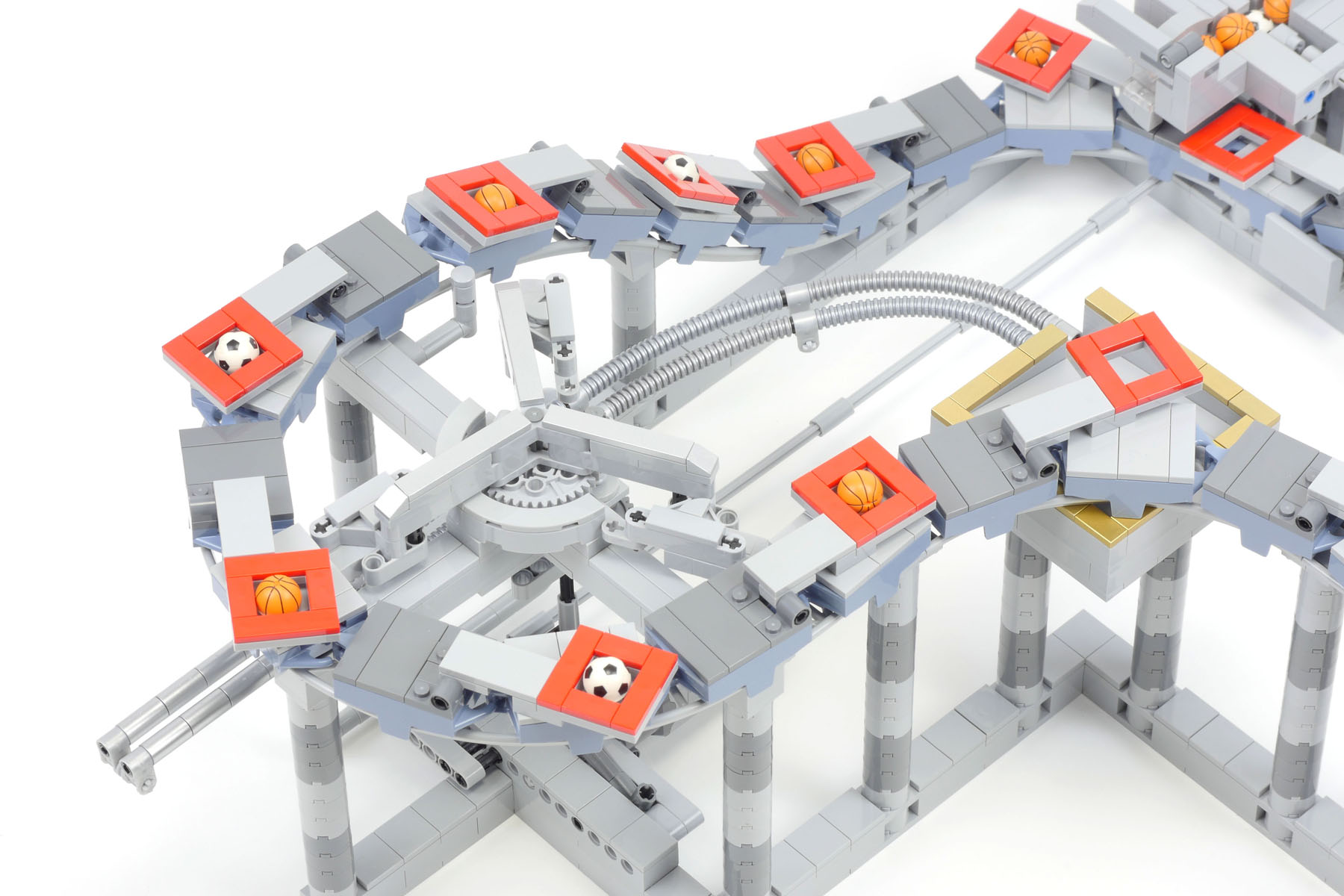
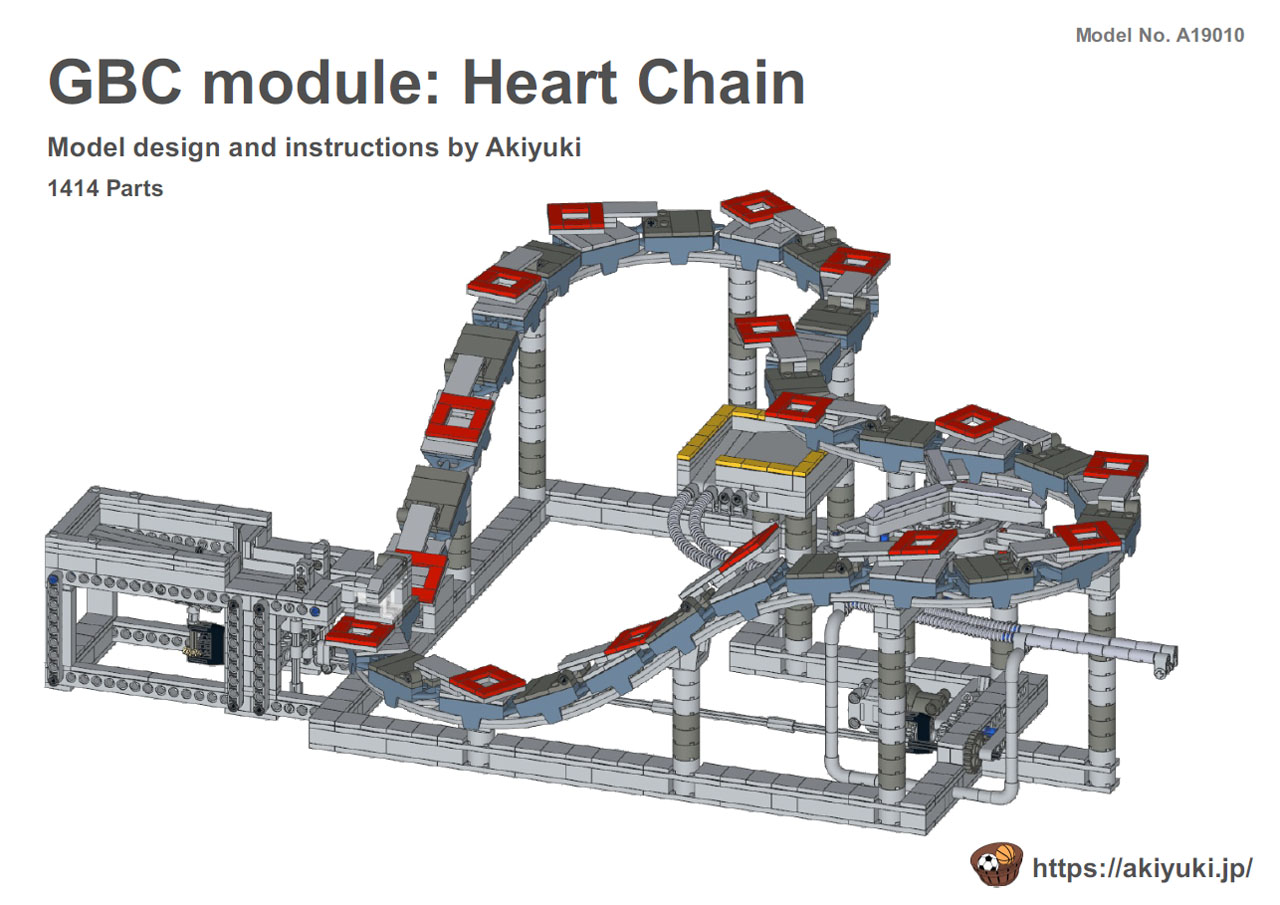
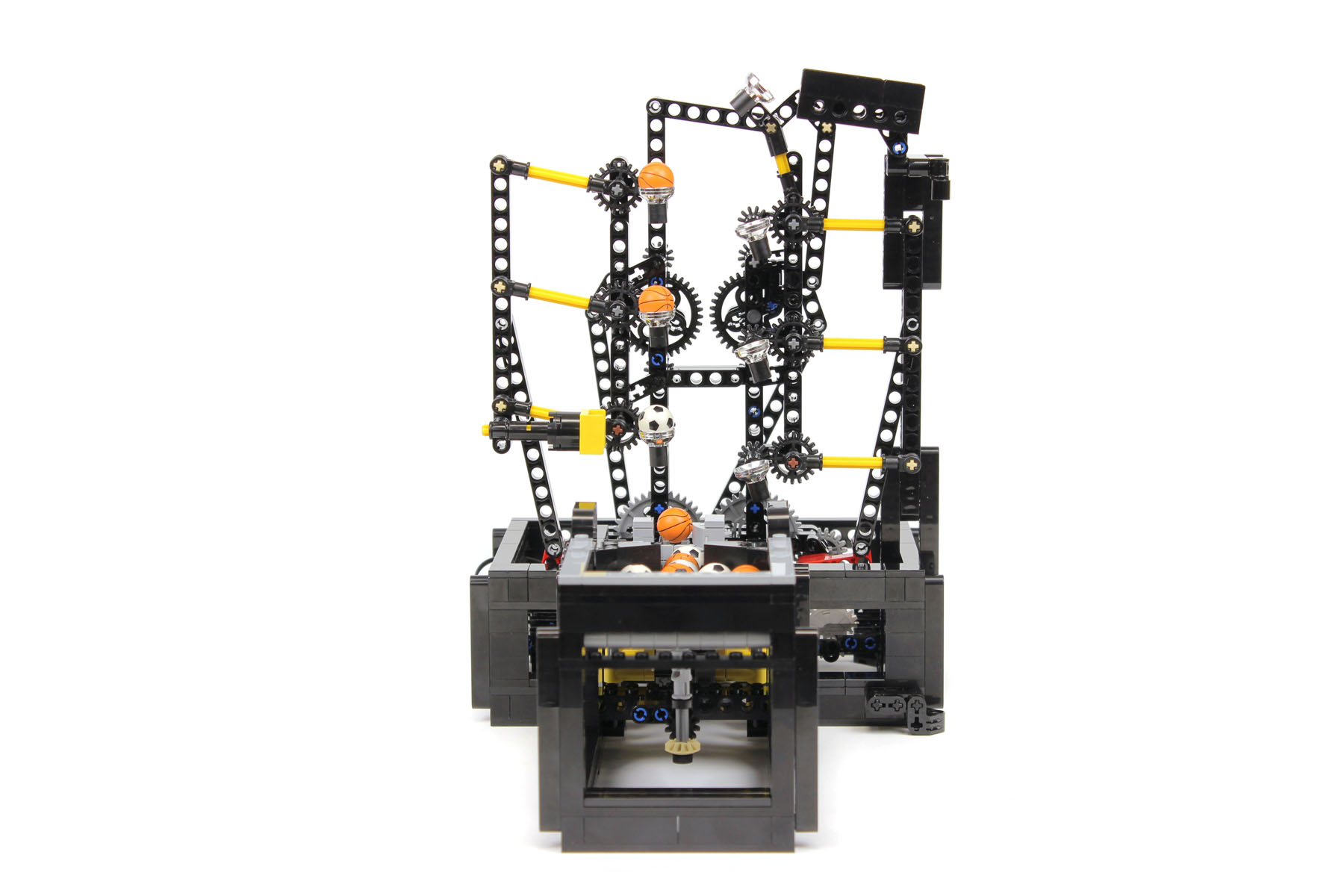
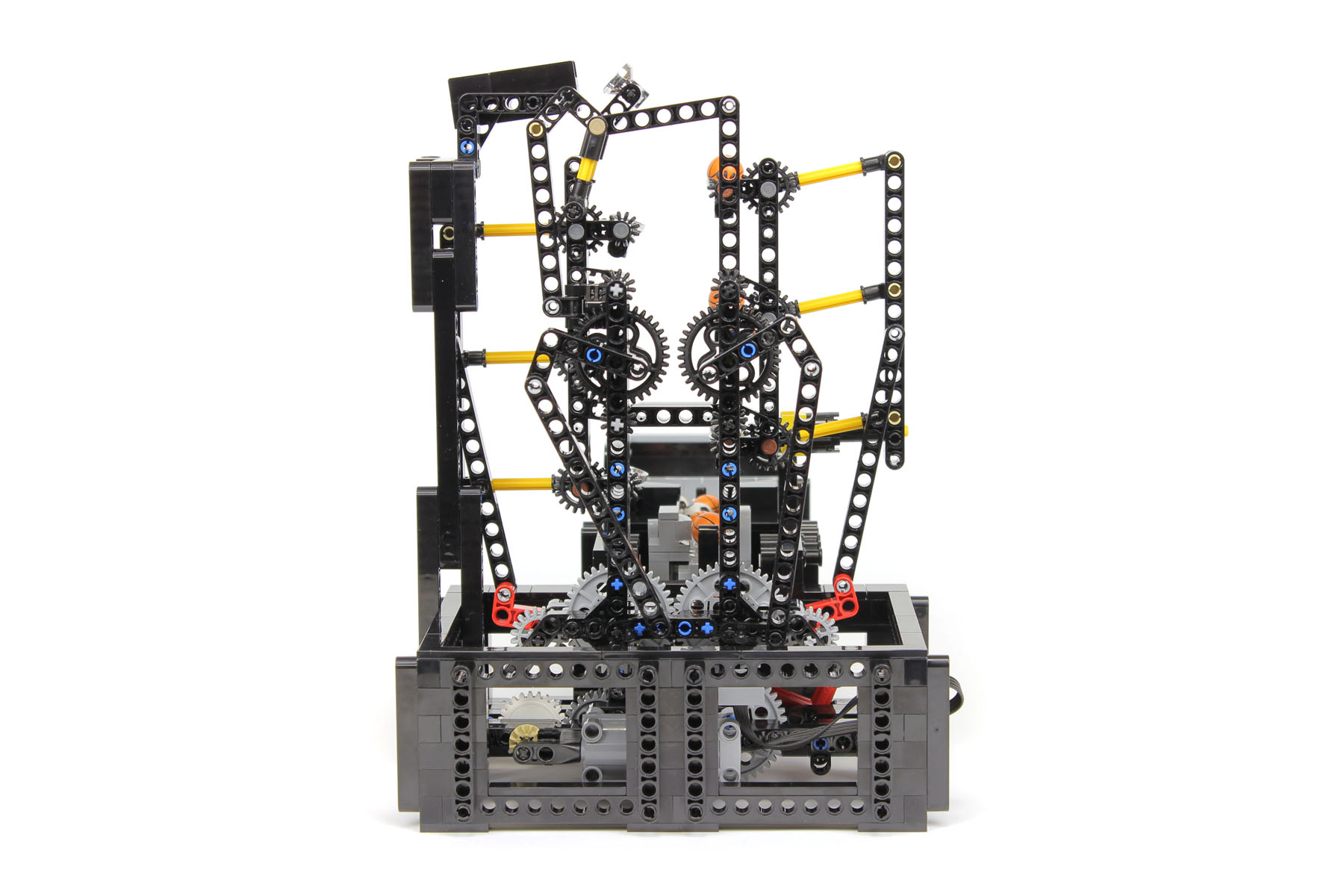
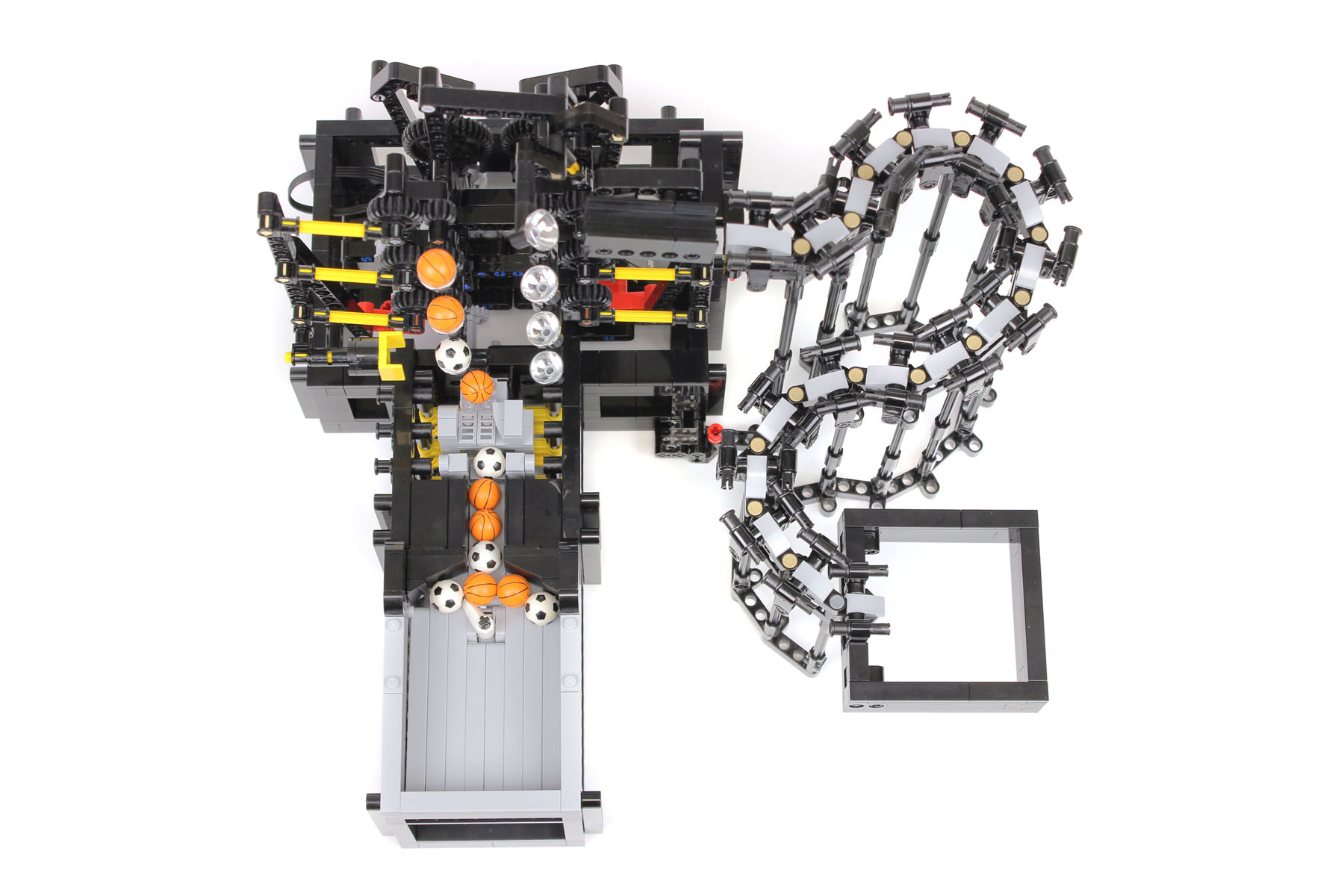
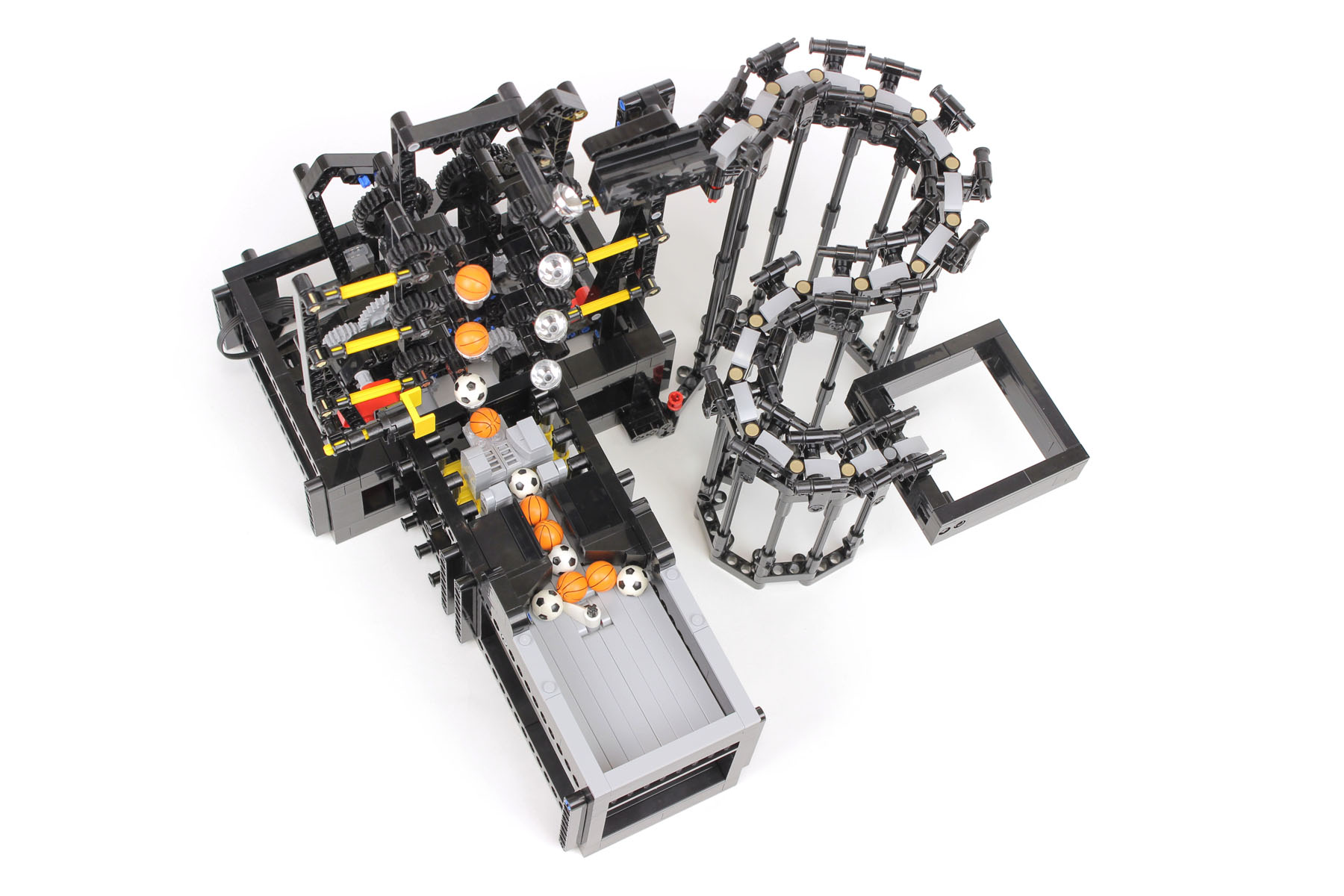
A heart mark is drawn by the chain that carries the balls in a new Great Ball Contraption (GBC) module. The module uses roller coaster parts, i.e., the roller coaster chassis and rails.
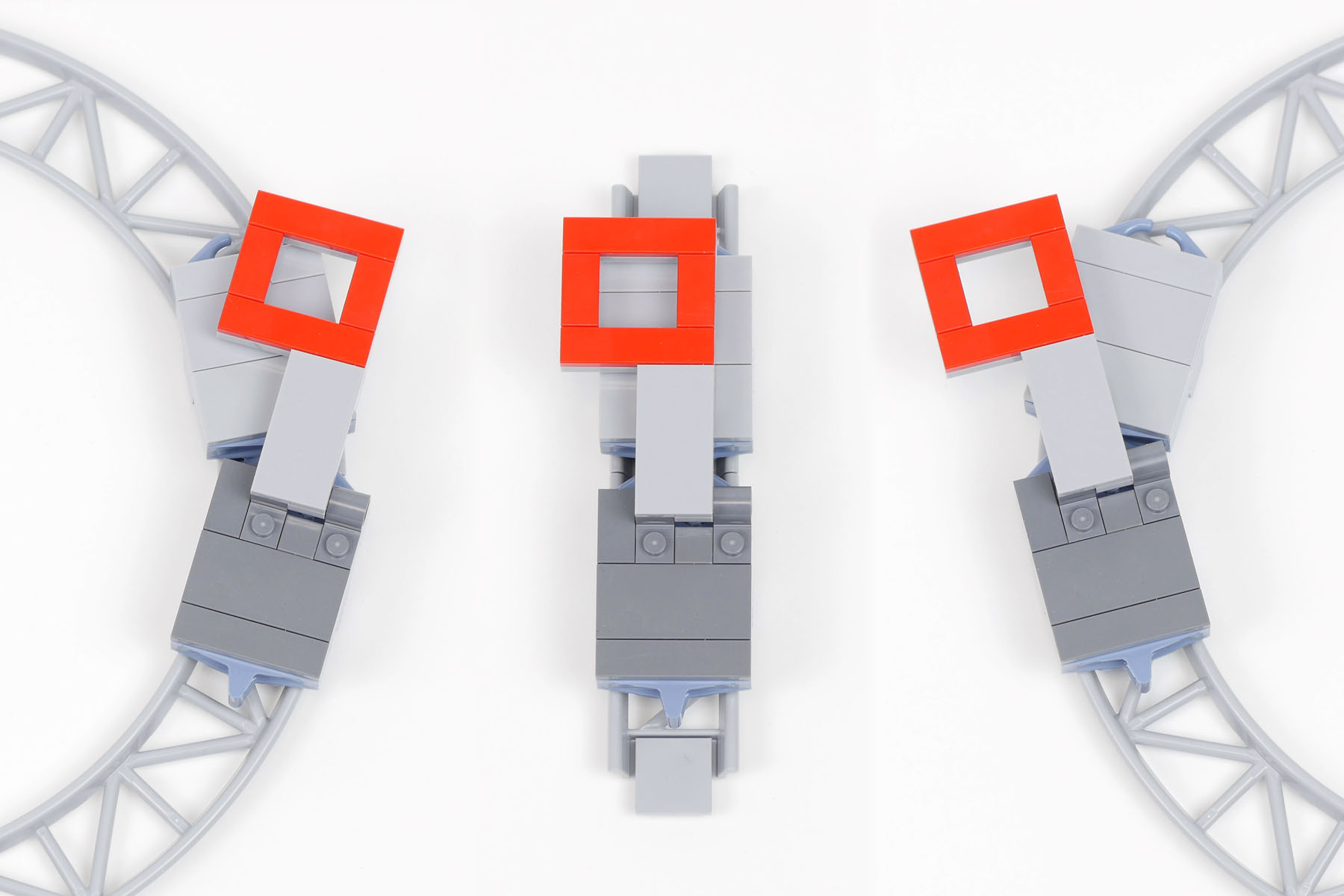
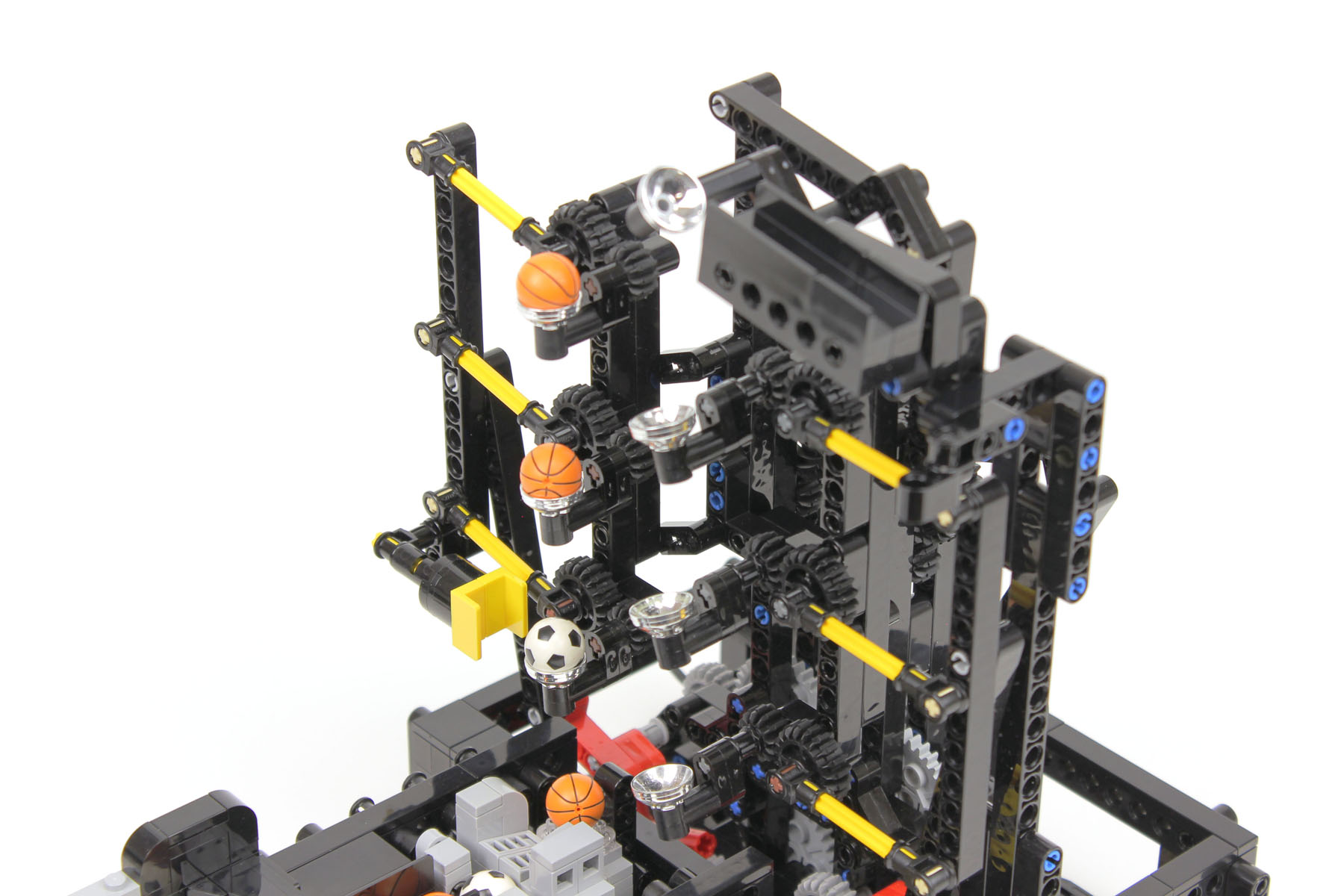
I had not planned the heart-shaped track, but the ball-carrying mechanisms resulted in the shape of the new module. The ball-release mechanisms using the roller coaster parts are explained by the following Figures. Balls stay in the red frames when they are going straight or to the left corner of the track, although they are released at the right corner. At least one right corner is necessary in a loop for the ball-release mechanisms to function. Consequently, the minimum-sized loop created a heart-shaped mark .
The module does not have high durability. During a 6-h running test, the friction between the roller coaster chassis and rails increased; consequently, the joint of the rails came off. The module is not suitable for use at the GBC exhibition. When the module is exhibited, the adhesion and lubrication are necessary for the rails. The rails at the slope are largely worn down. It is better to make the slope angle gently.
Instructions, the CAD data set, and part lists are available for this module; the instructions and CAD data set require payment, while part lists are free.
Instructions and CAD data set are available upon payment, which you can transfer via PayPal. Once your payment has been completed and confirmed by PayPal, an automatic reply email will deliver the download URL. If there is a problem, please contact me using my information on the contact form.
Item: Heart Chain, instructions, and CAD data set (A19010I,A19010M)
Price: JPY 864
Contents: PDF instructions (73 pages), CAD data set (MPD file)
Notice:
You must prepare all bricks listed in the part lists by yourself. To operate the module, in addition to the parts listed, a battery box for PowerFunction and the balls for playing GBC are necessary.
The instructions are intended for persons who have experience assembling Lego Technic.
You must not copy and distribute the instructions, CAD data, and part lists.
Started: November 2018
Completed: December 2018
Released: February 2019
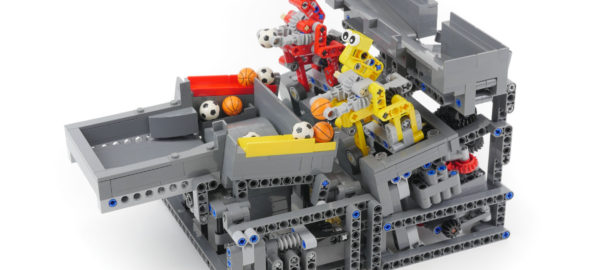
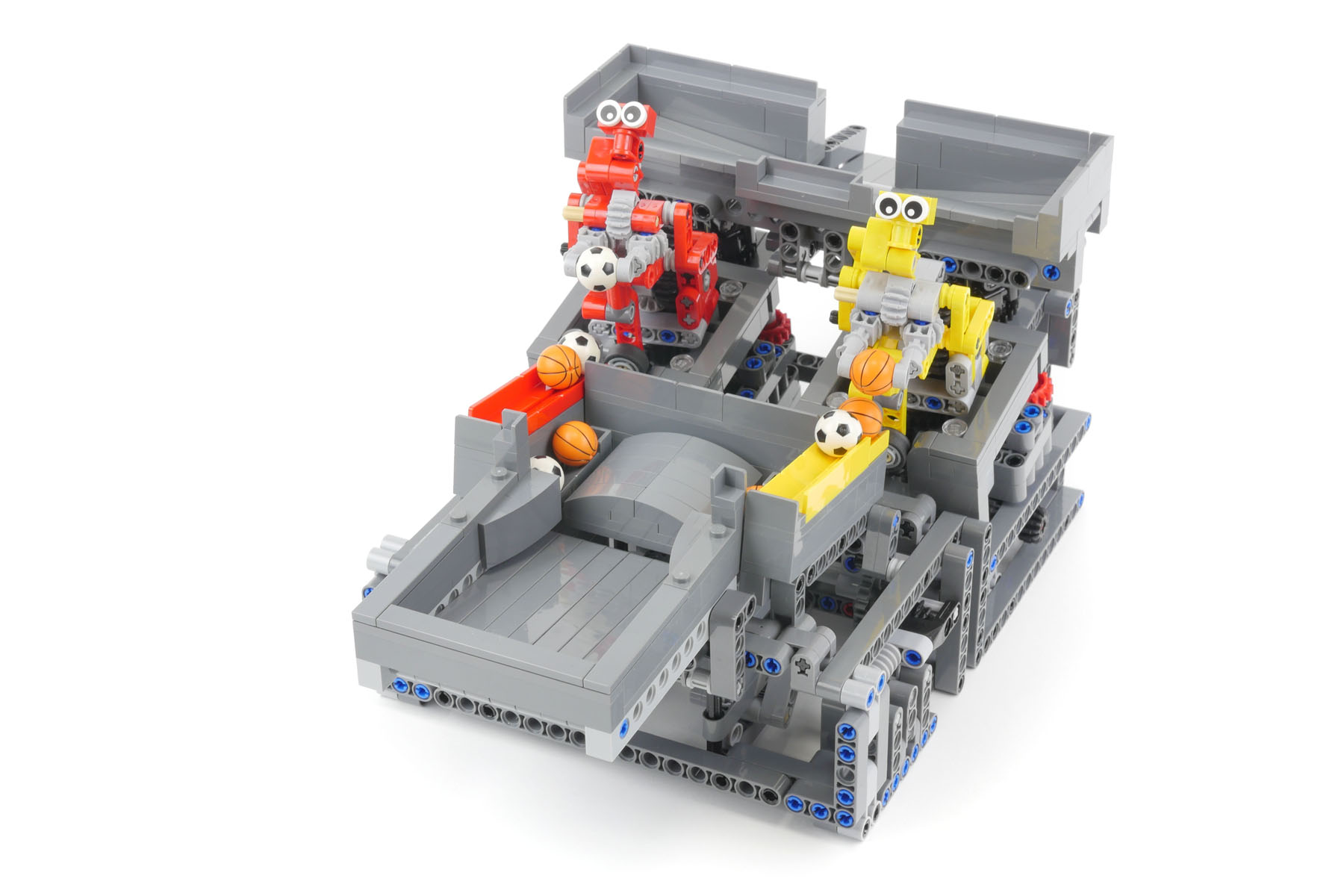
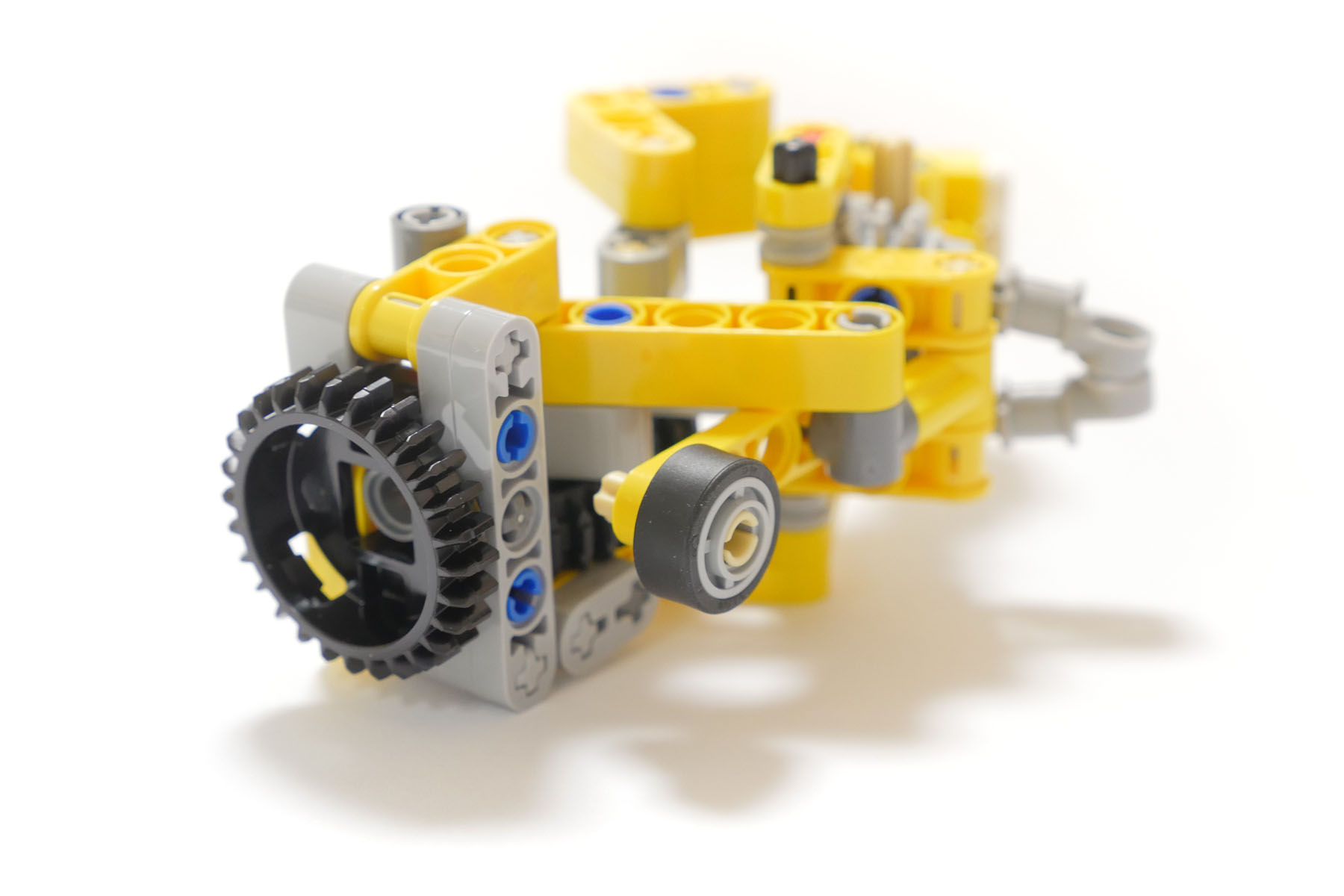
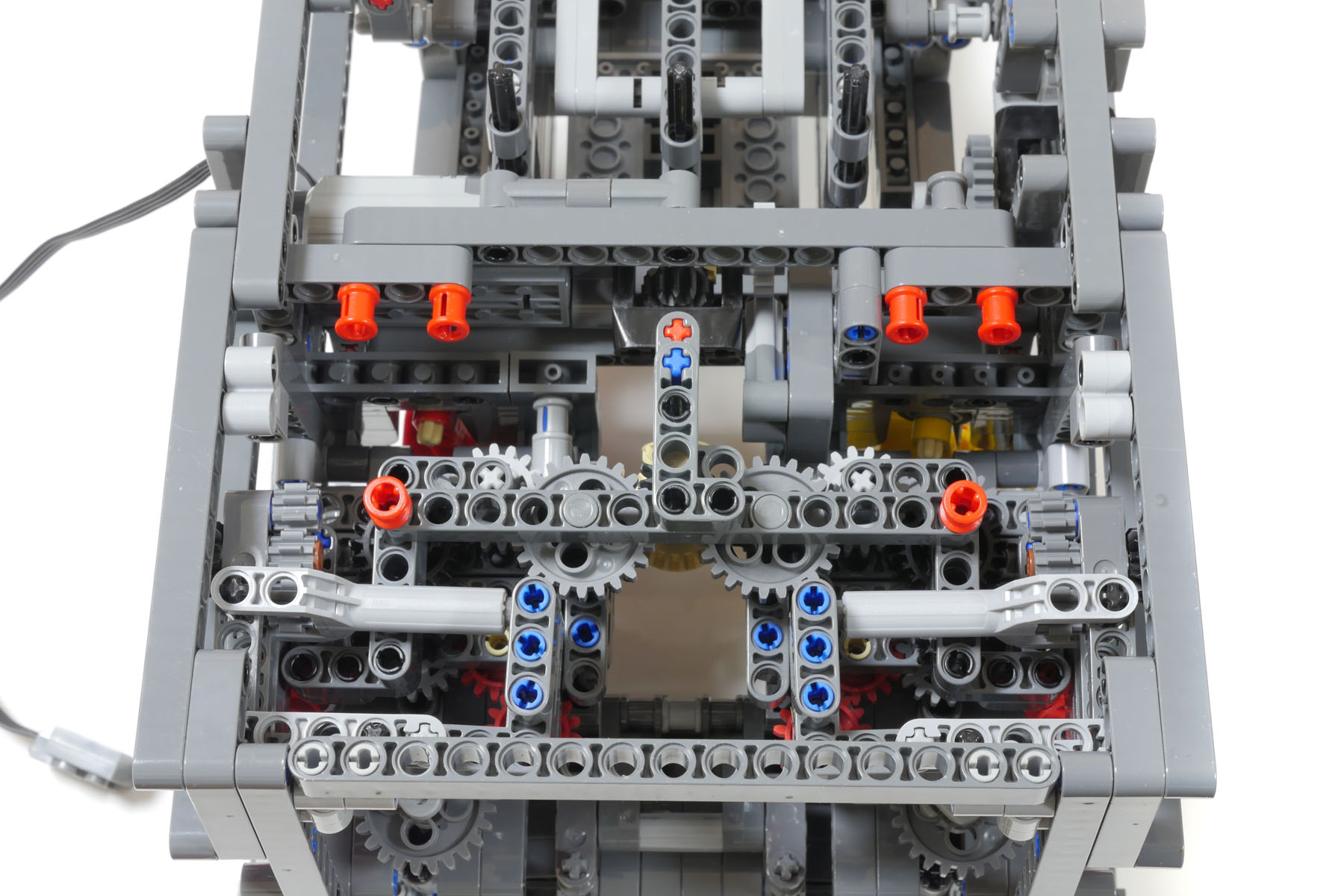
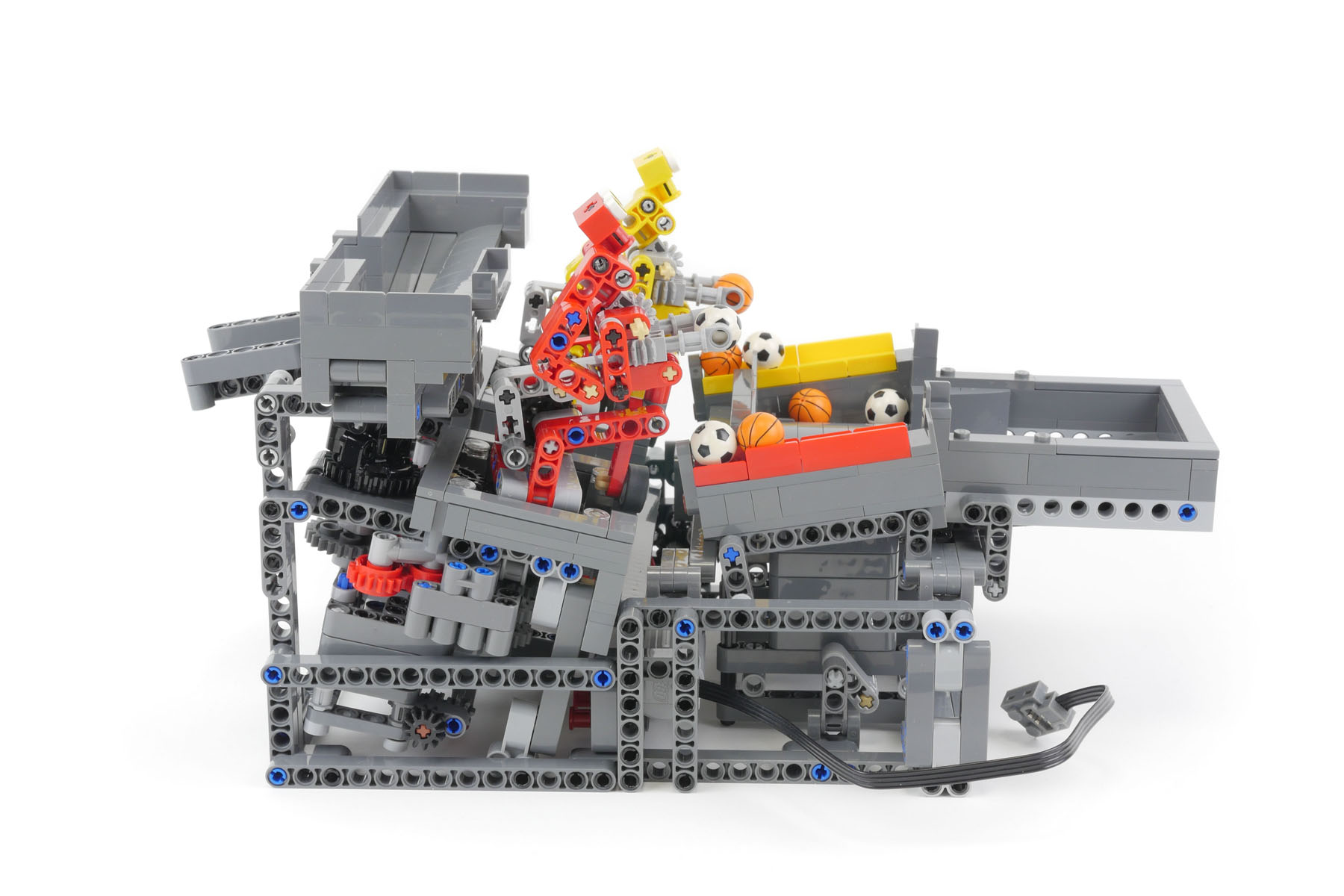
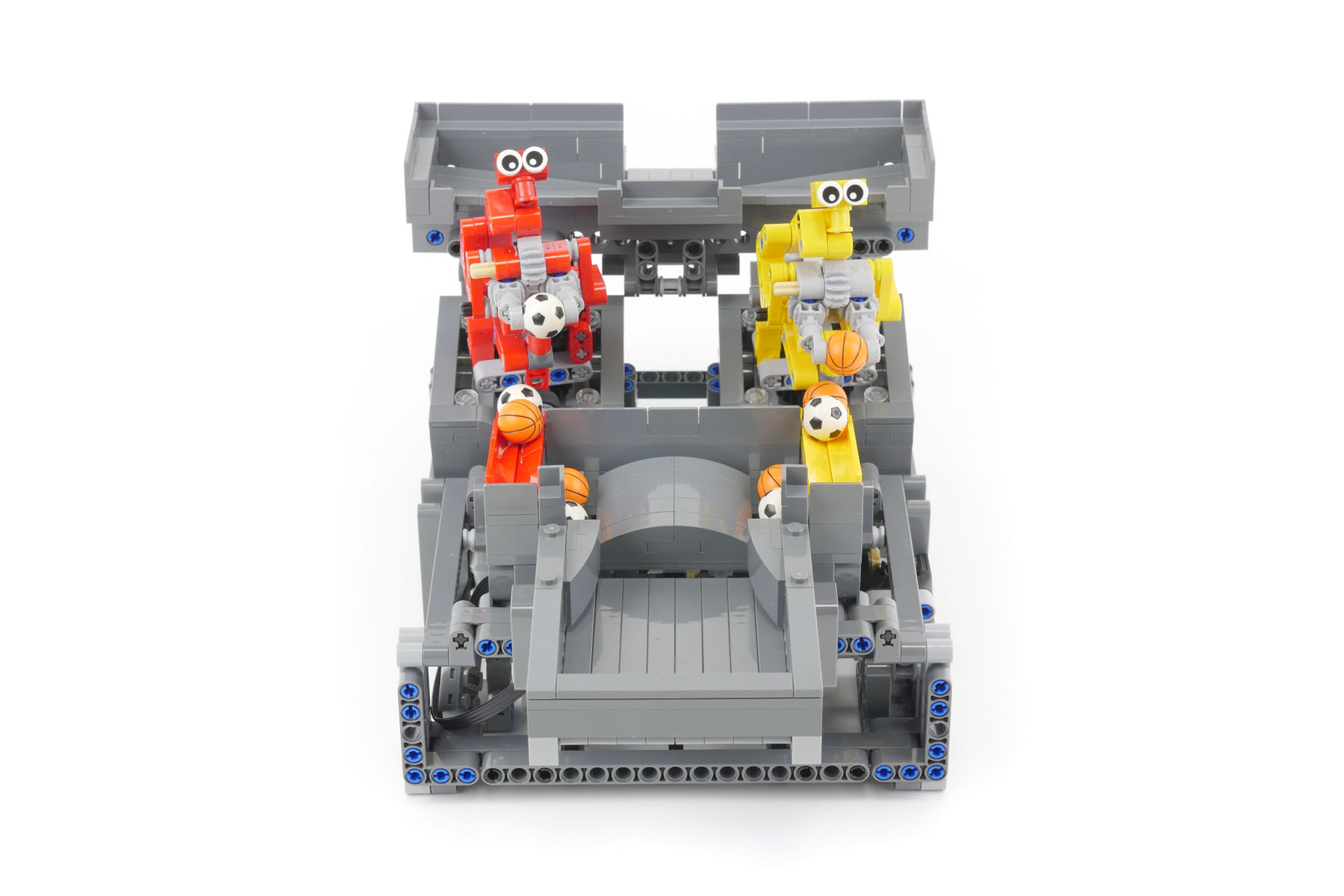
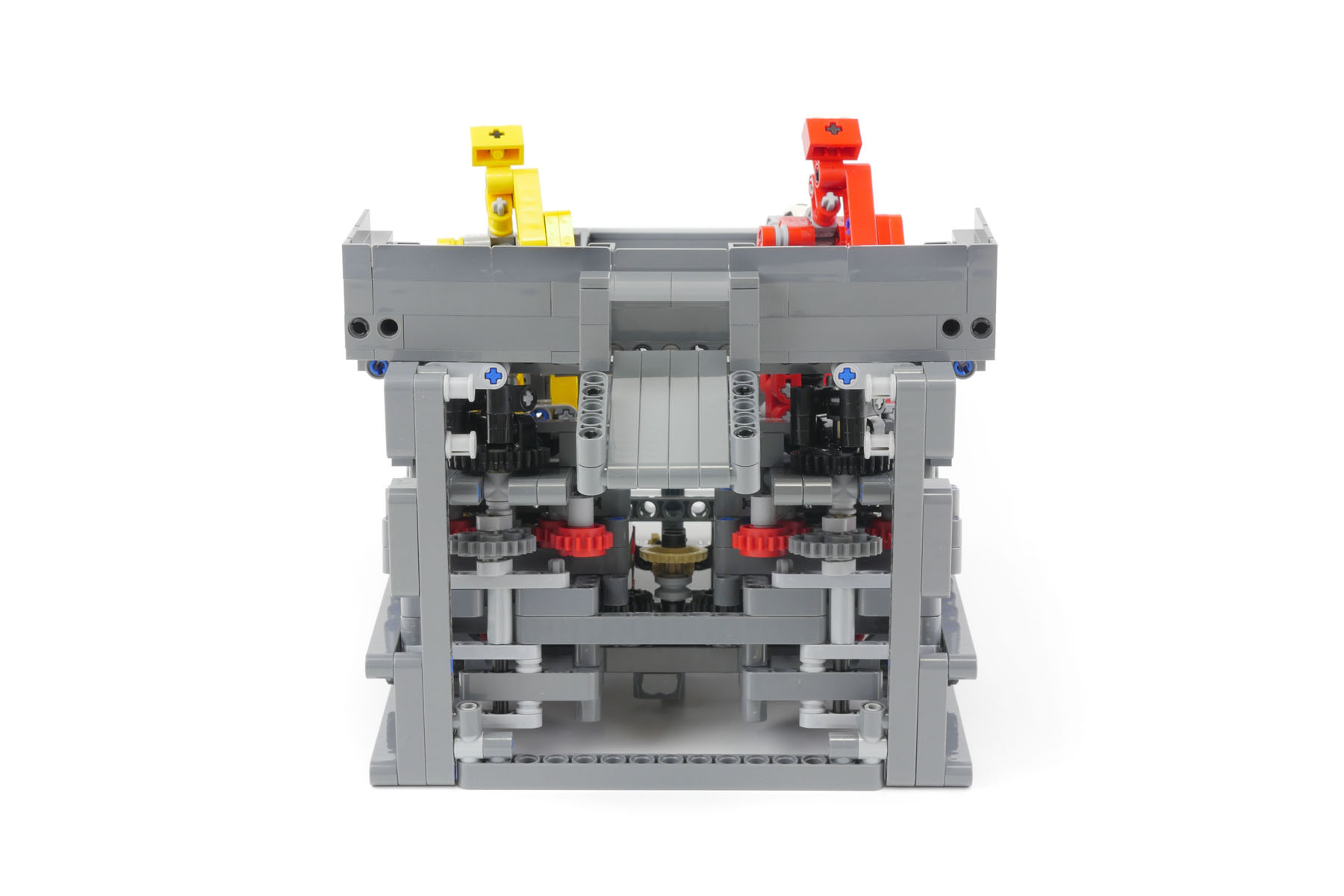
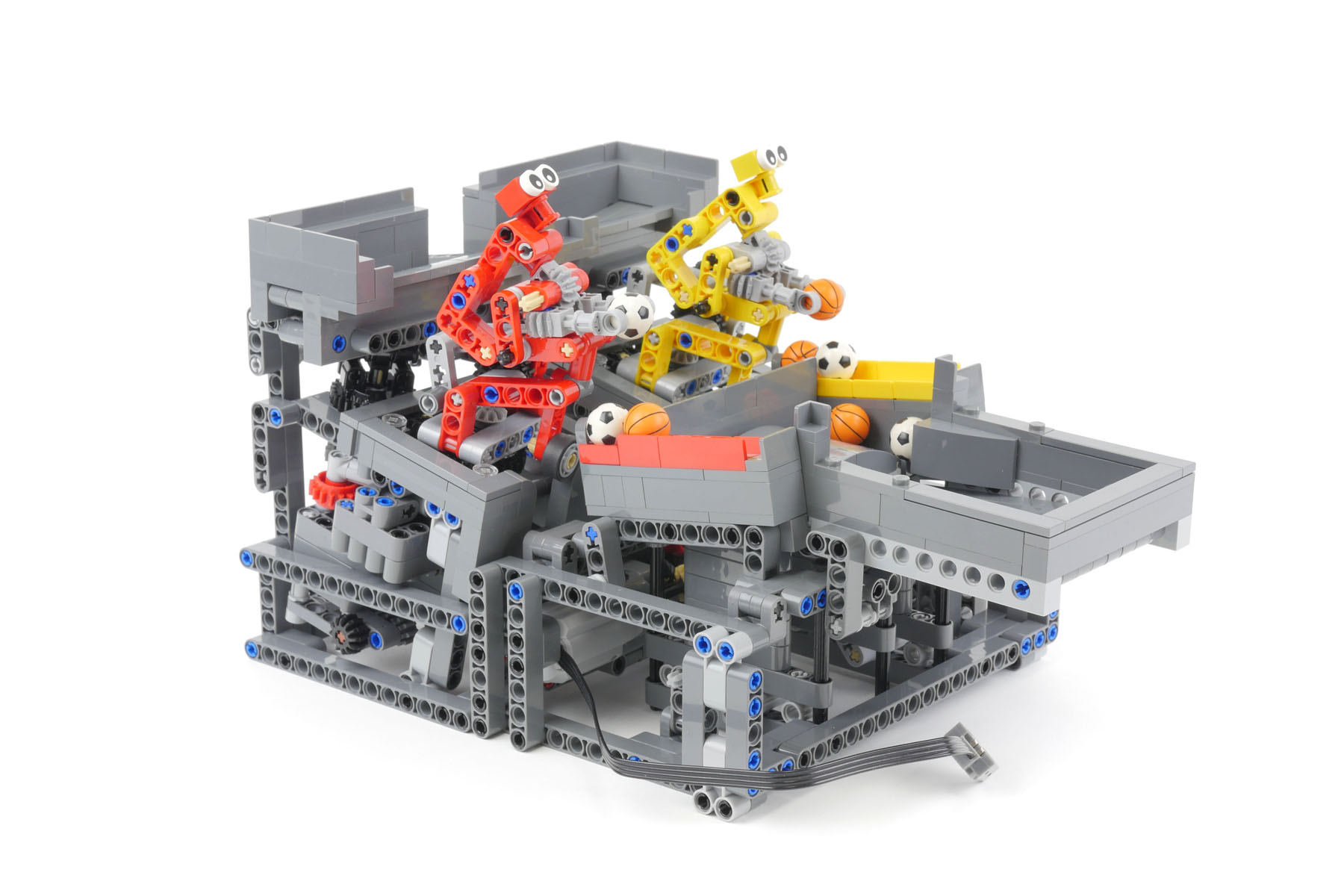
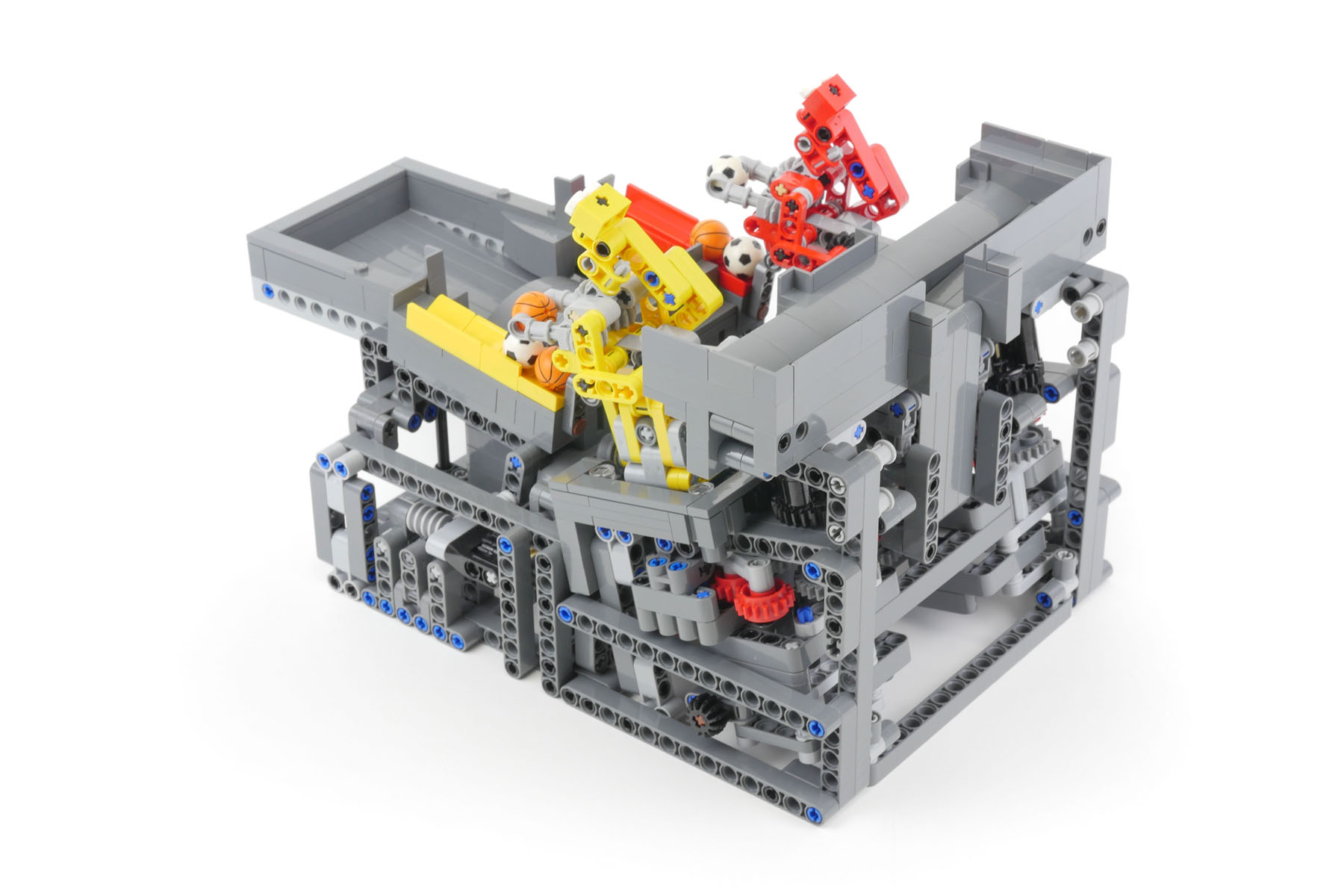
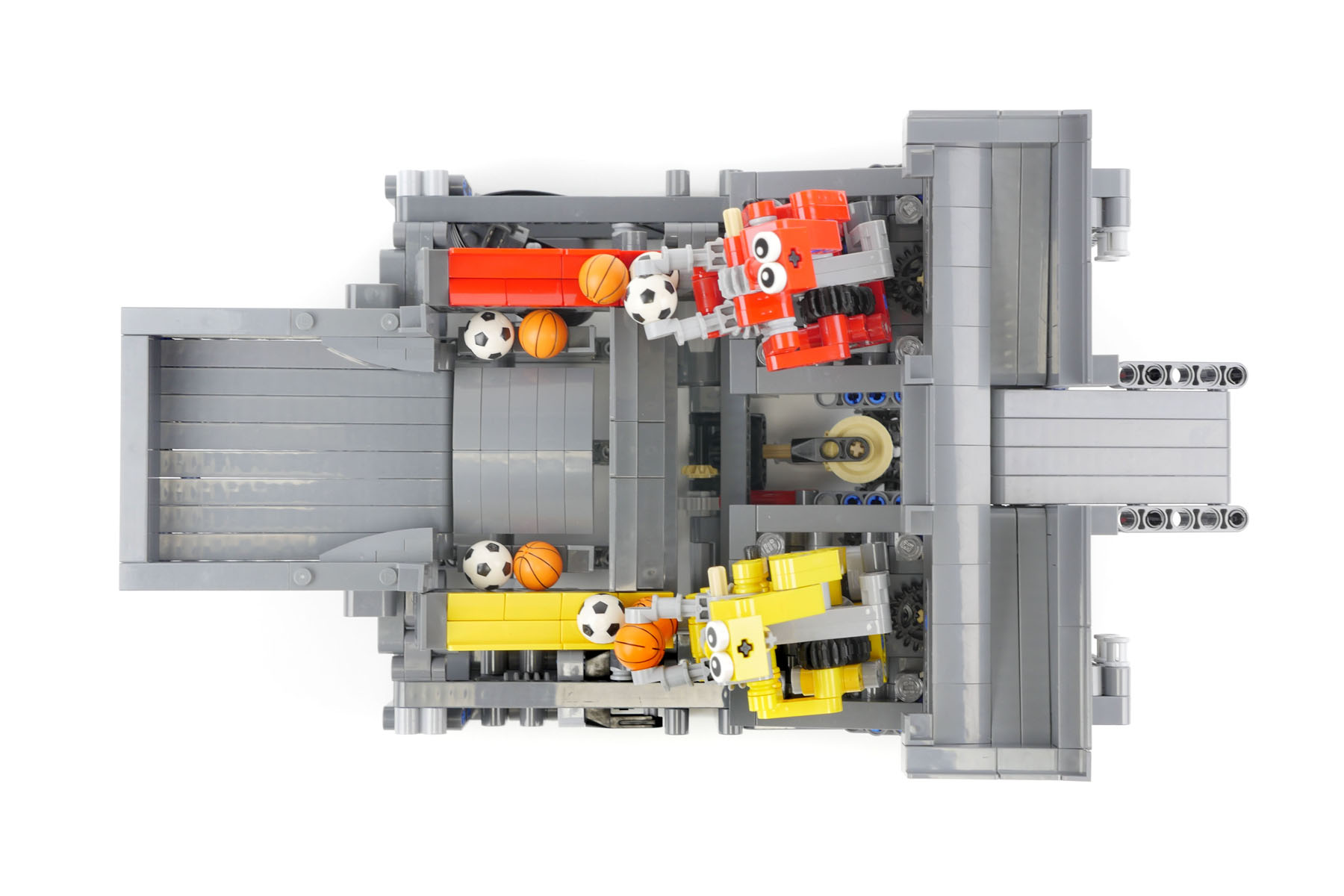
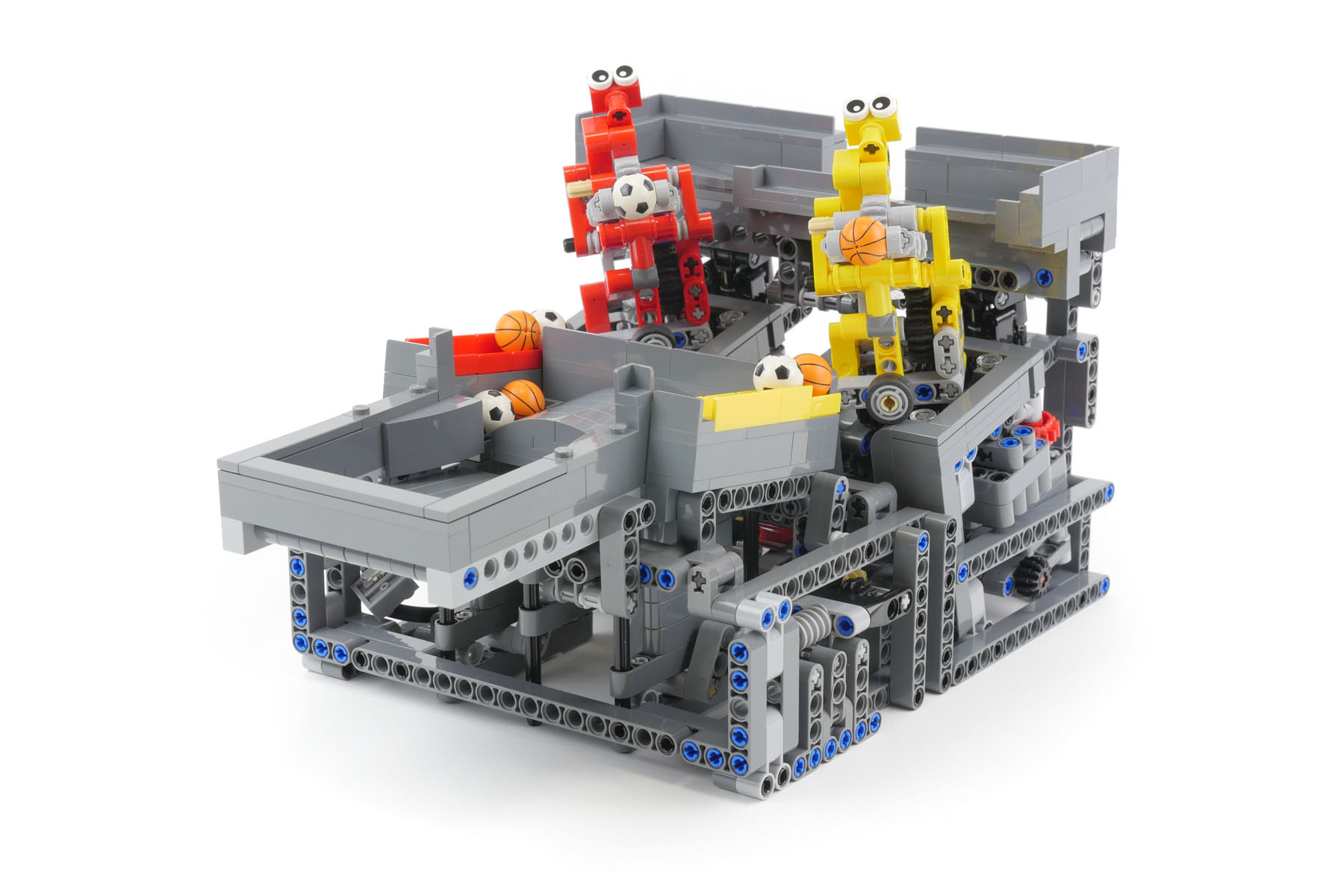
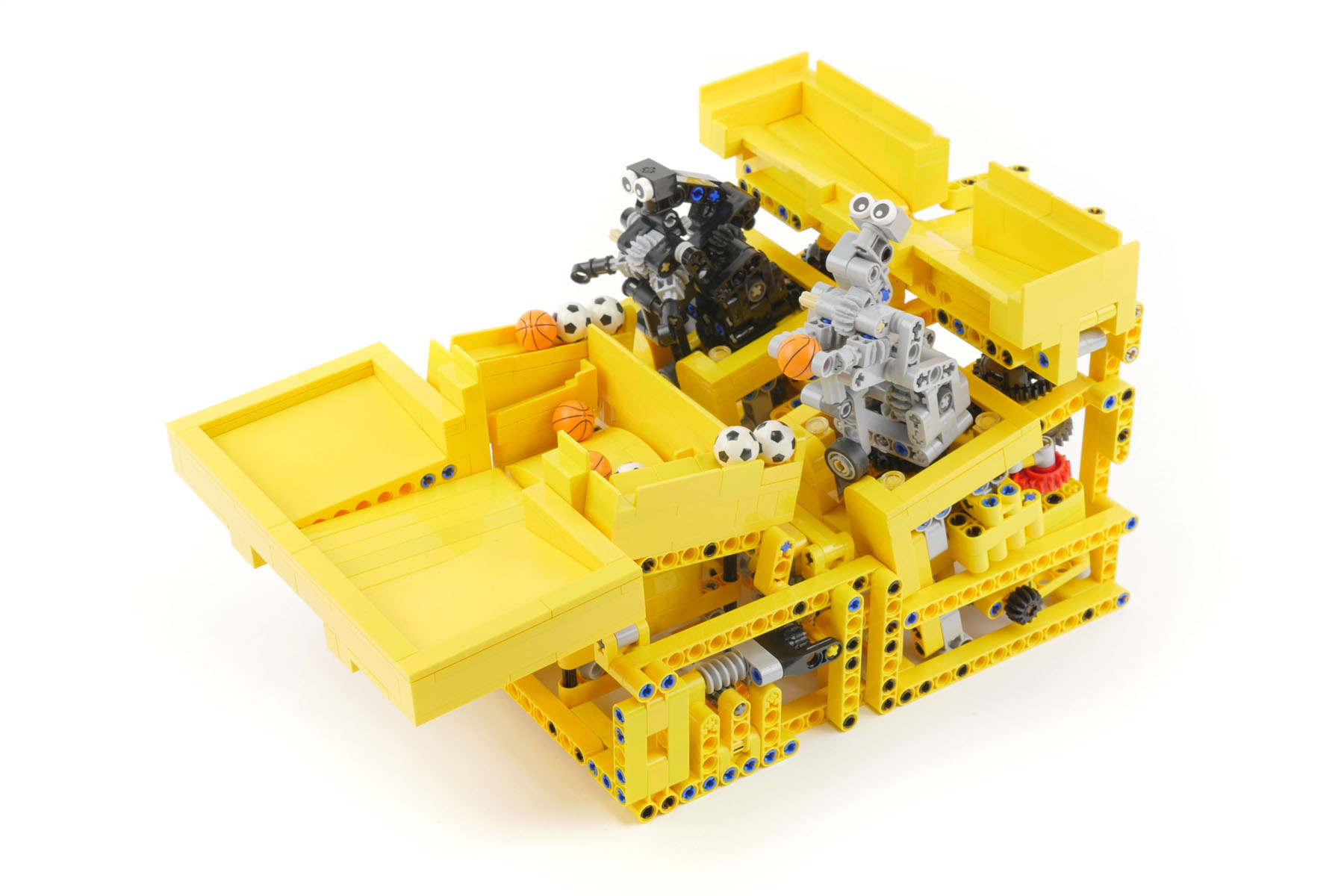
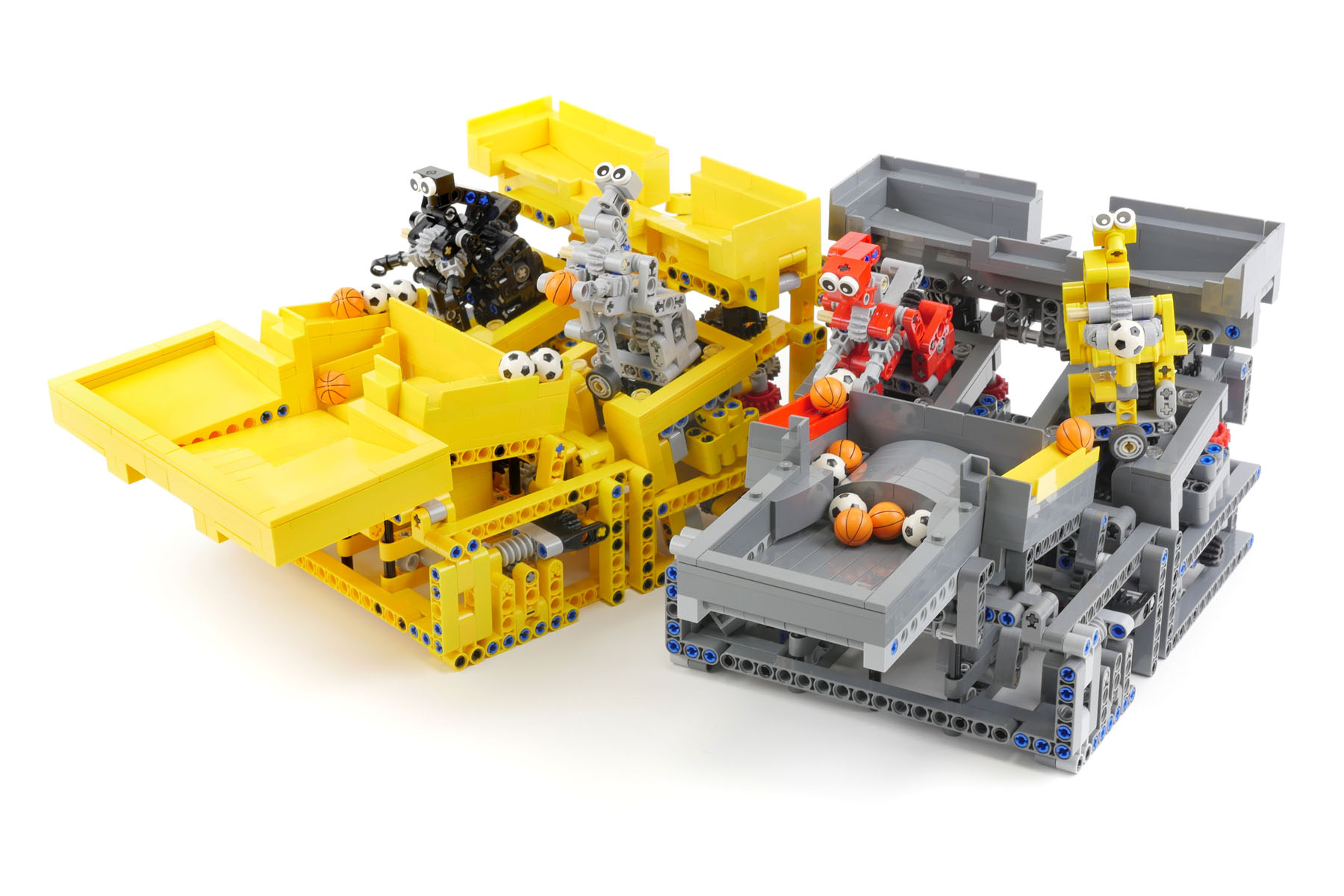
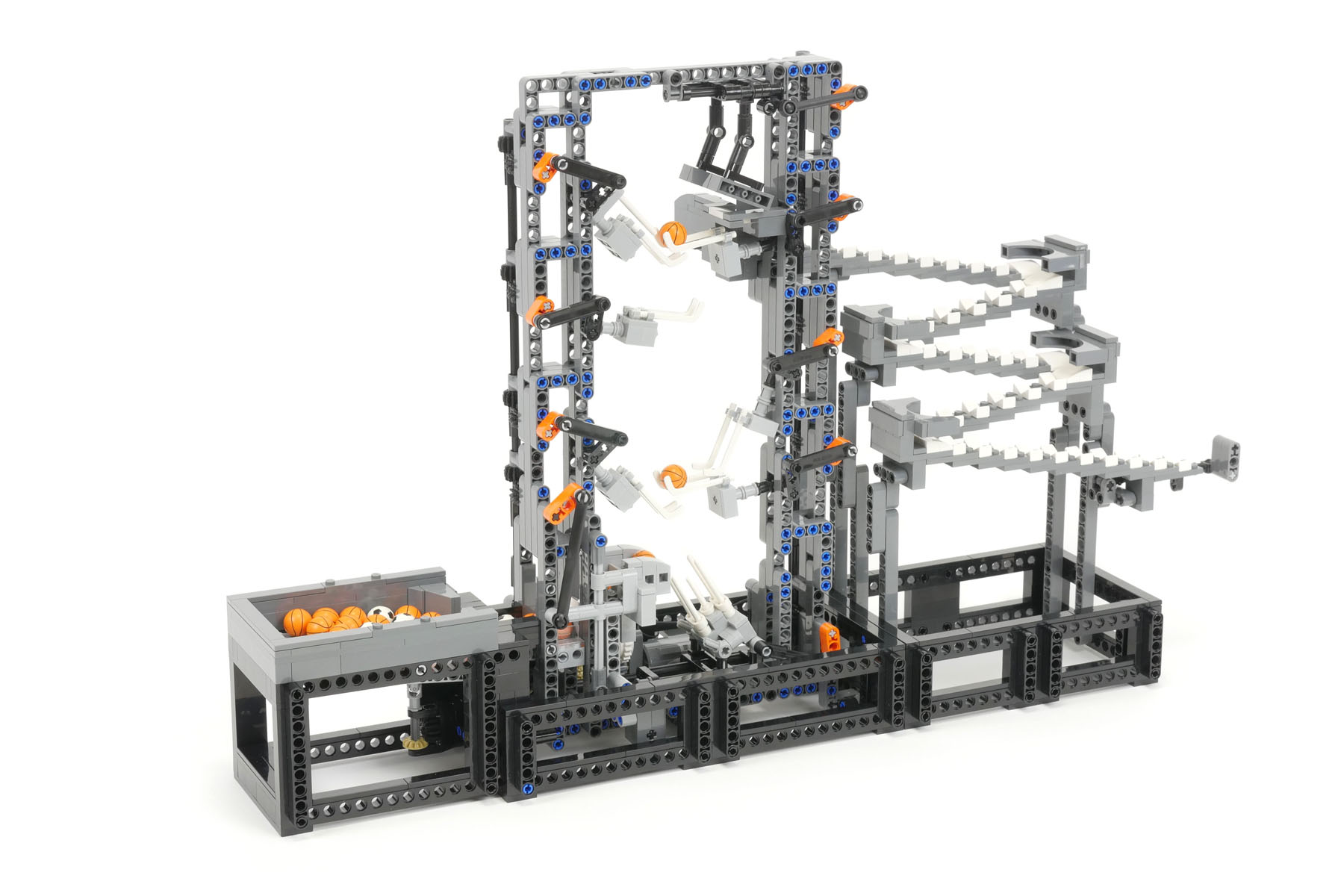
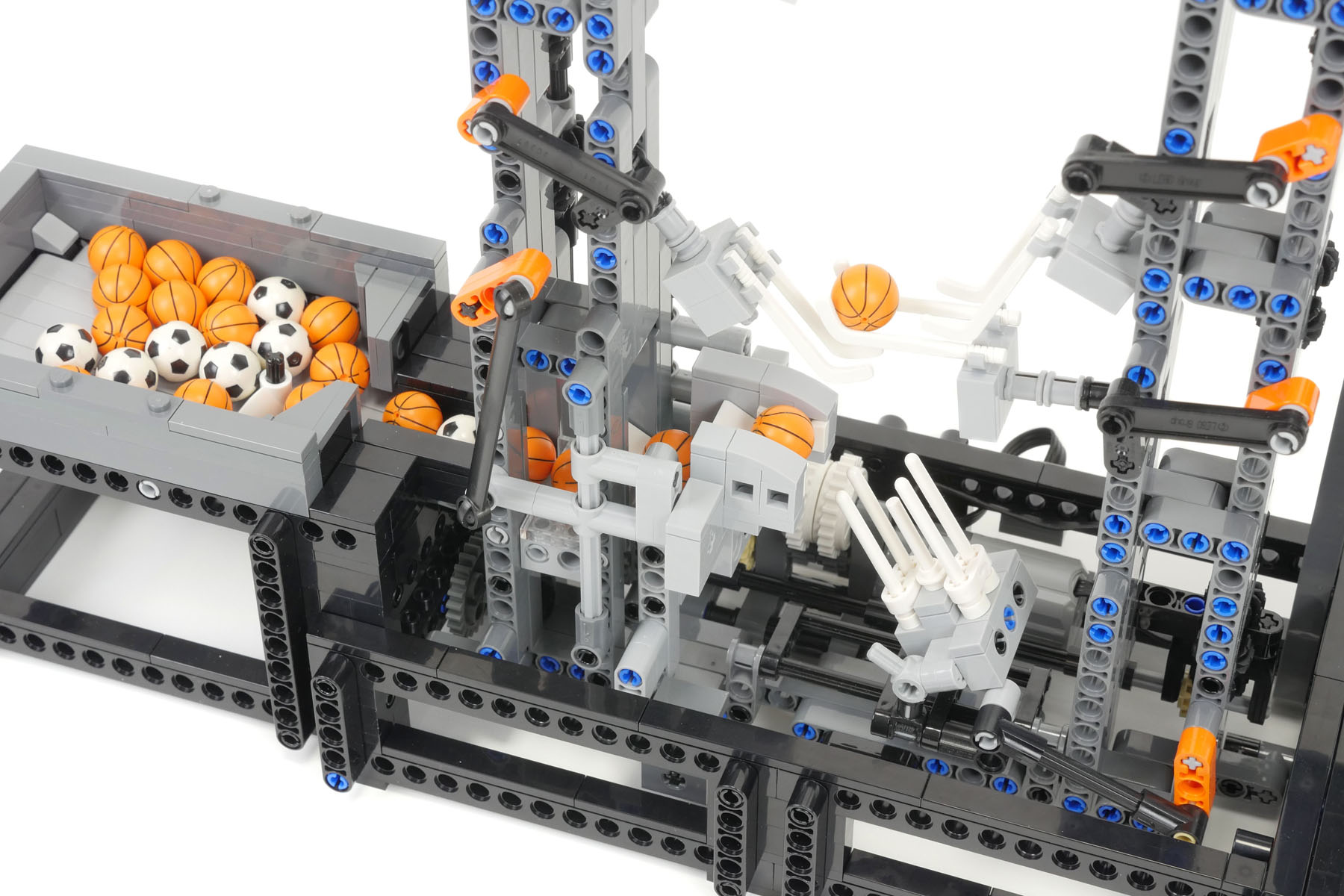
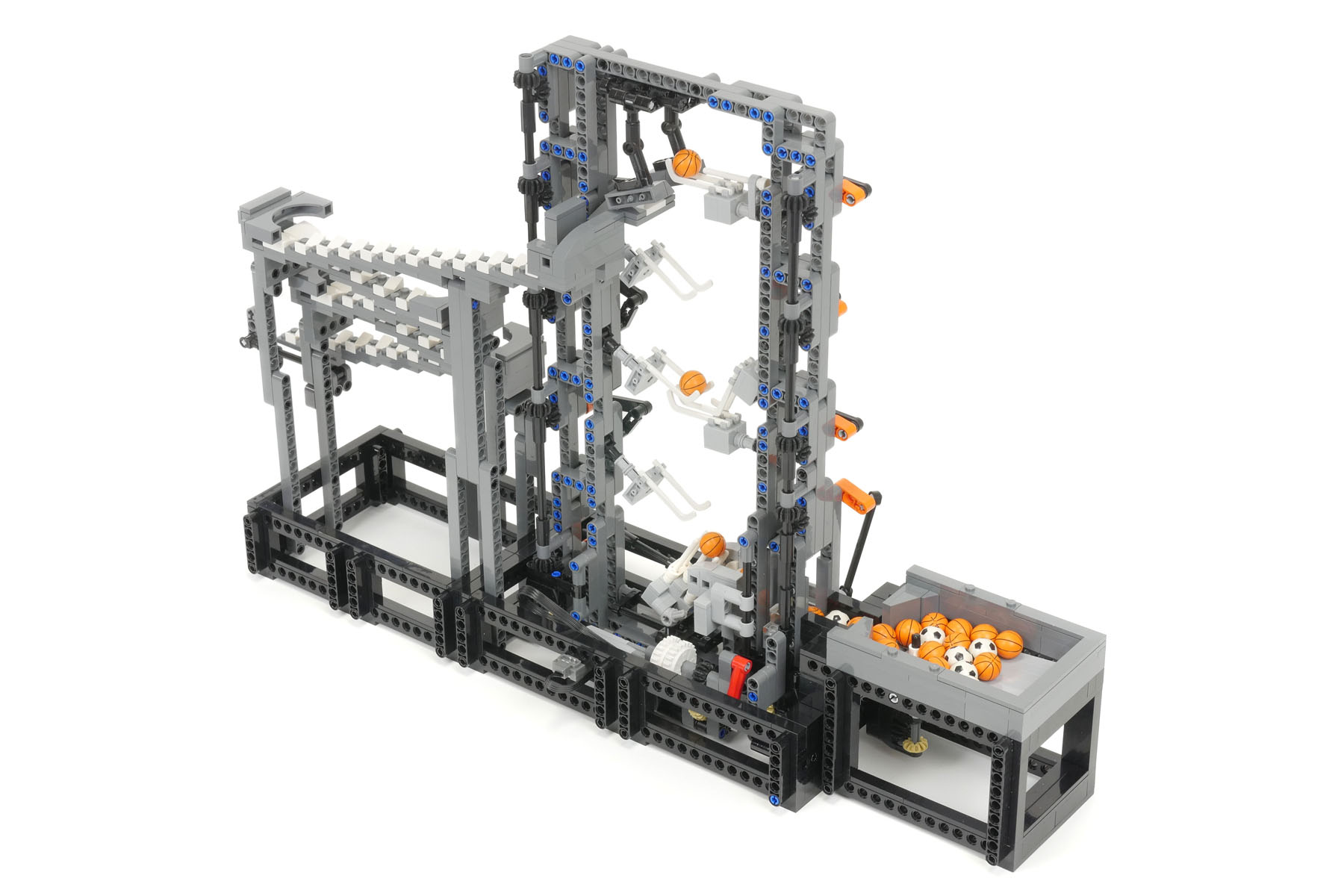
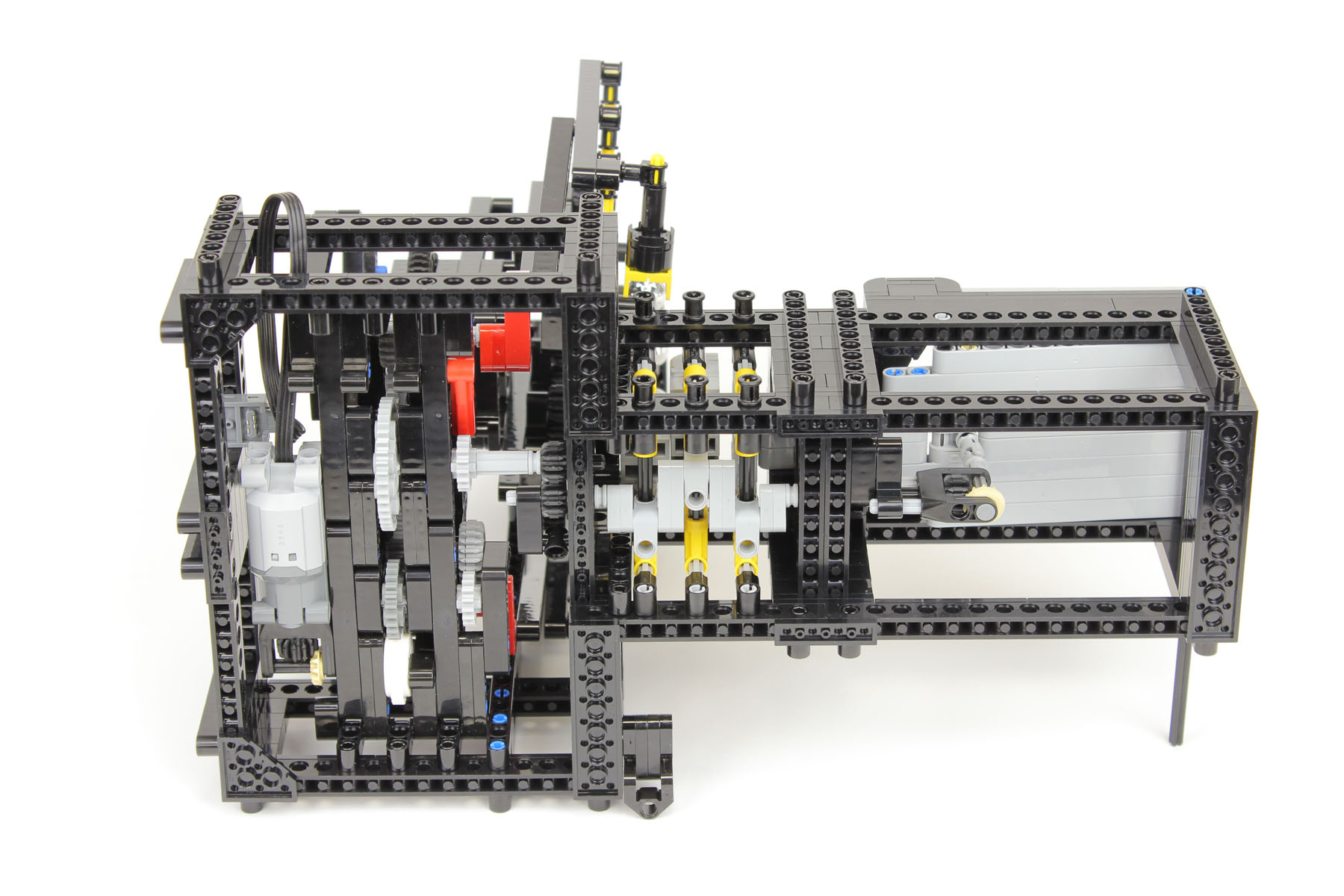
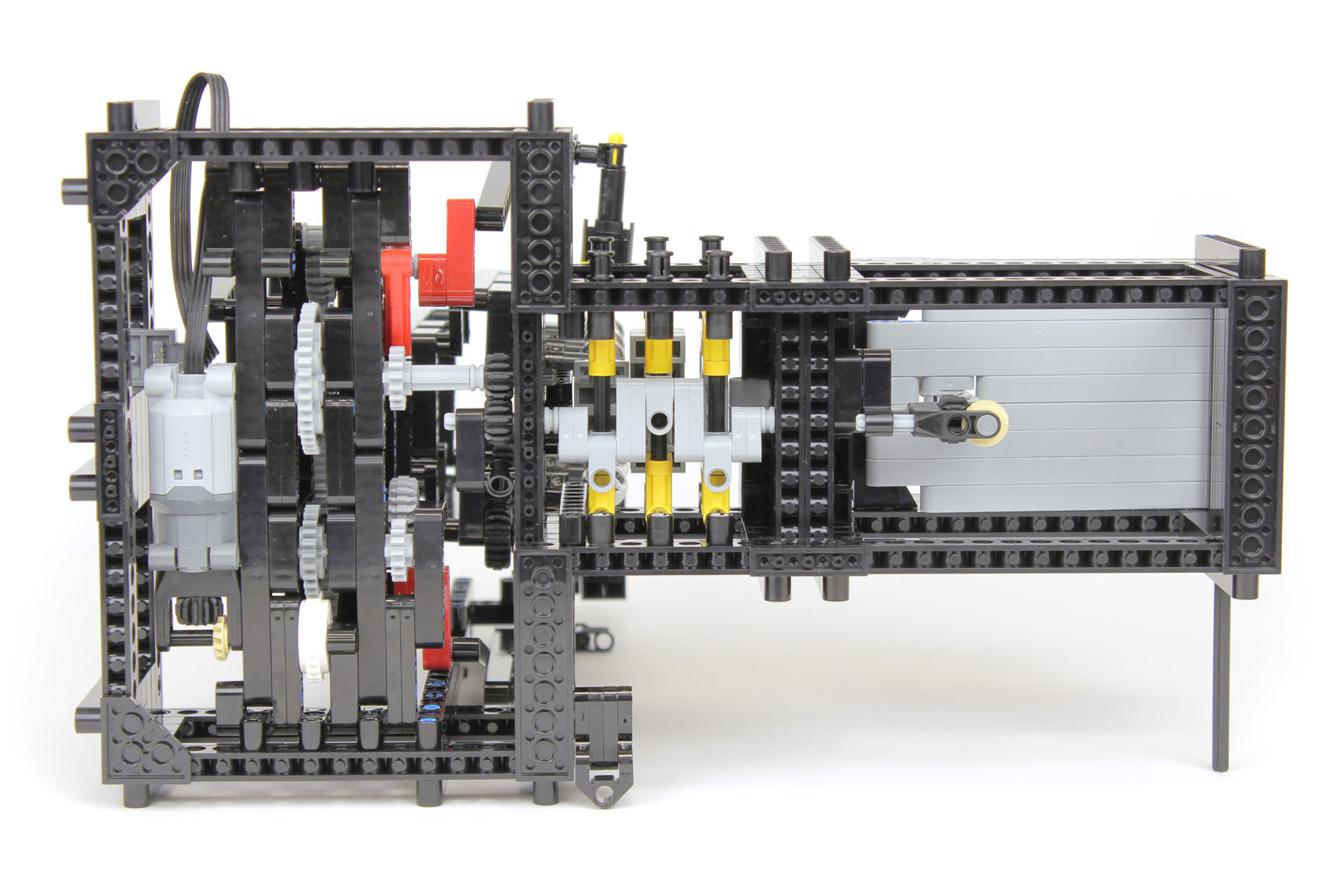
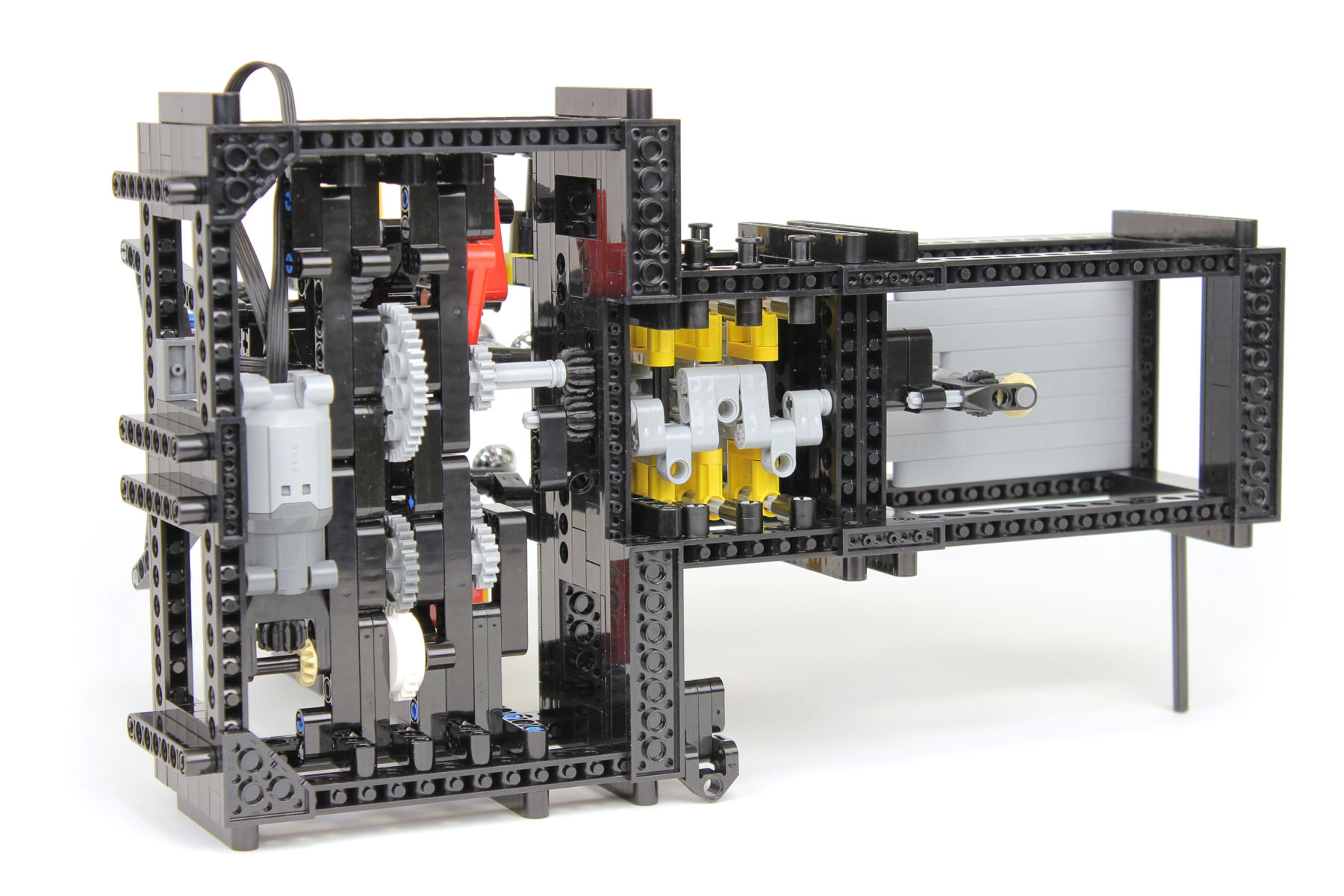
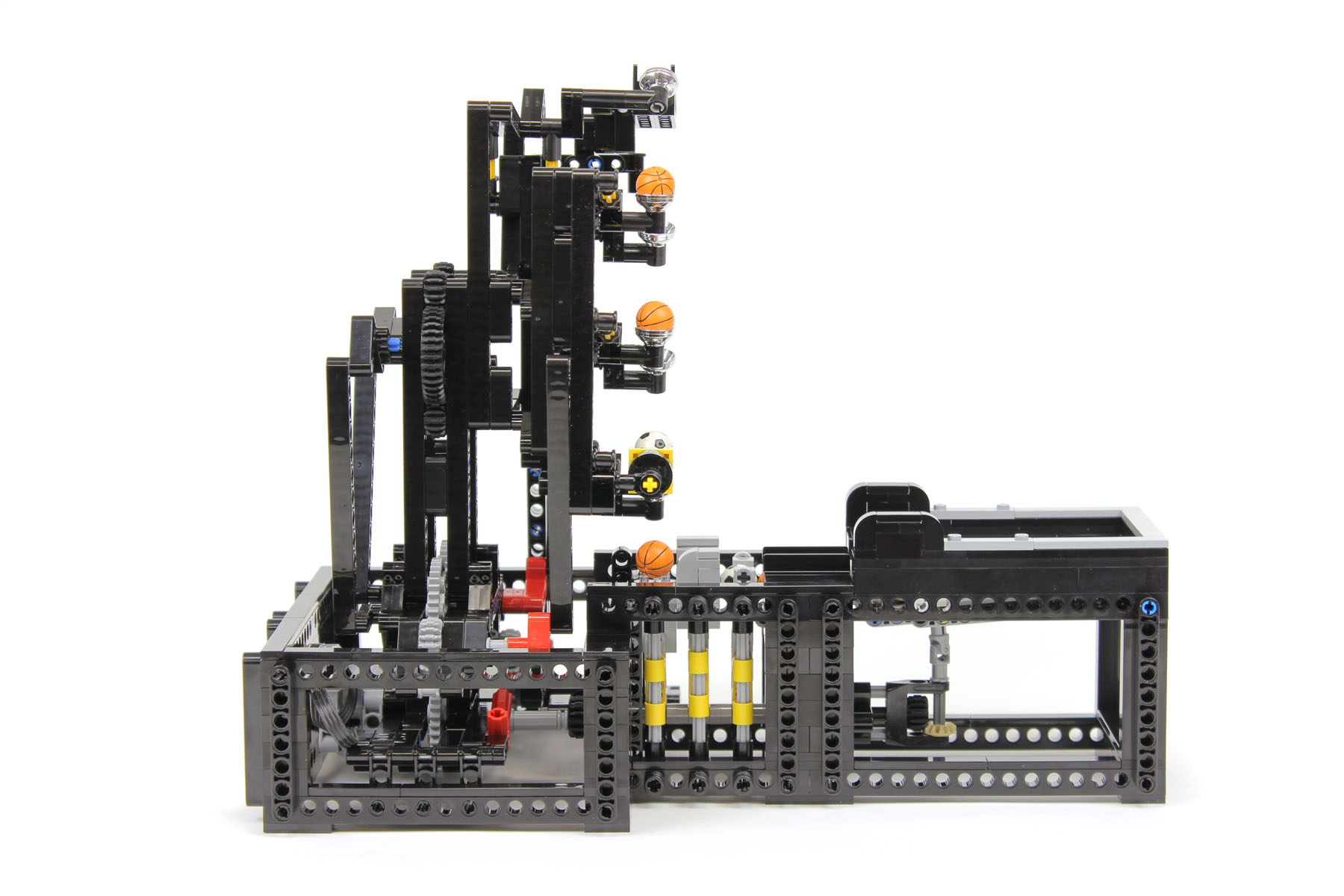
Two small hardworking robots that swing their arms and bag the balls are placed on a new great ball contraption (GBC) module. As soon as the robots catch the rolling balls in front of them, they quickly turn back and throw them away. They begin performing the motion of carrying the balls only when they find the balls in front of them. This implies that the ball-catching motion acts as a trigger for the ball-carrying motion. Two robots are necessary for the module to achieve a ball-carrying speed of more than 1 ball/second, which is the GBC standard. At the ball-supply part, the balls are separated into two lanes by a stair lifting up and down. All the motions of the module are driven by only one motor, as usual.
The mechanism of the module is complicated and delicate. Troubles may arise due to the friction in the driving system. I have tried to improve the mechanism of the driving system in order to avoid any friction. I have reconstructed the driving system several times. In the new module, a turntable with 28 teeth is separated into an upper part and a lower part. Only the upper black part with 28 teeth is used for the new module to prevent the troubles caused by friction at the turntable. The earlier types of the module with non-separated turntables underwent troubles during their long-term operations owing to friction at the turntable.
The power strength of the robot hands holding the balls affects the ball-carrying motion. Robots can be prevented from dropping the balls during the ball-carrying motion by varying the ball-holding power. The ball-holding power can be adjusted using the two dials available in both sides of the module. The ball-holding power needs to be adjusted after assembling the module for a smooth function.
The frame of my GBC modules usually consist of Technic bricks. However, I constructed the frame of the new module using liftarm parts. This frame structure possesses adequate strength for a smaller module.
If you want to build the GBC module “Catch and Spin Robots”
Building Instructions were sold directly on this website until December 2023,
From January 2024, sales will be moved to the following affiliated websites. We have also started to sell kits that include parts as well as building instructions.
Please click on the links below to purchase building instructions and kits.
Started: April 2018
Completed: May 2018
Released: September 2018
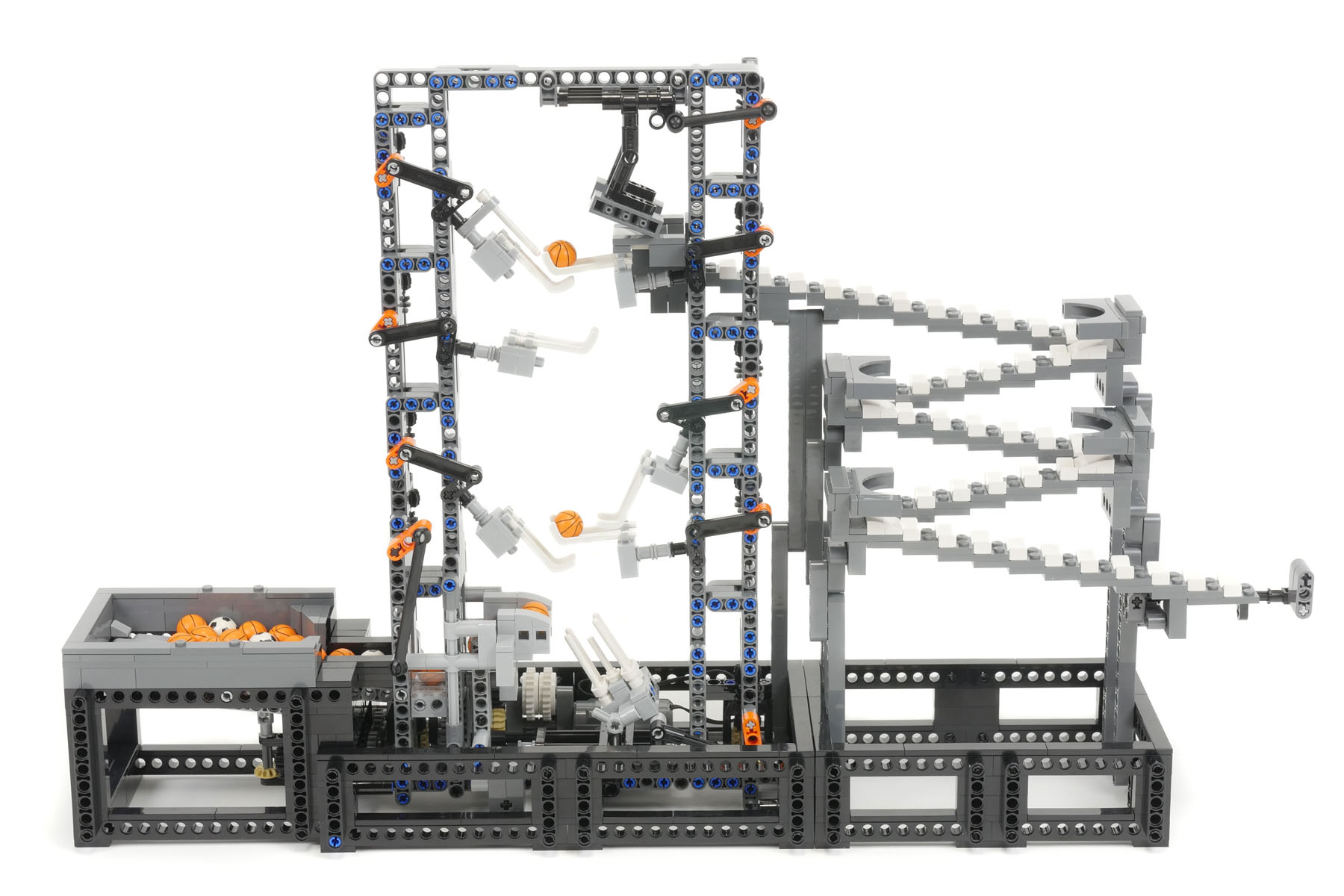
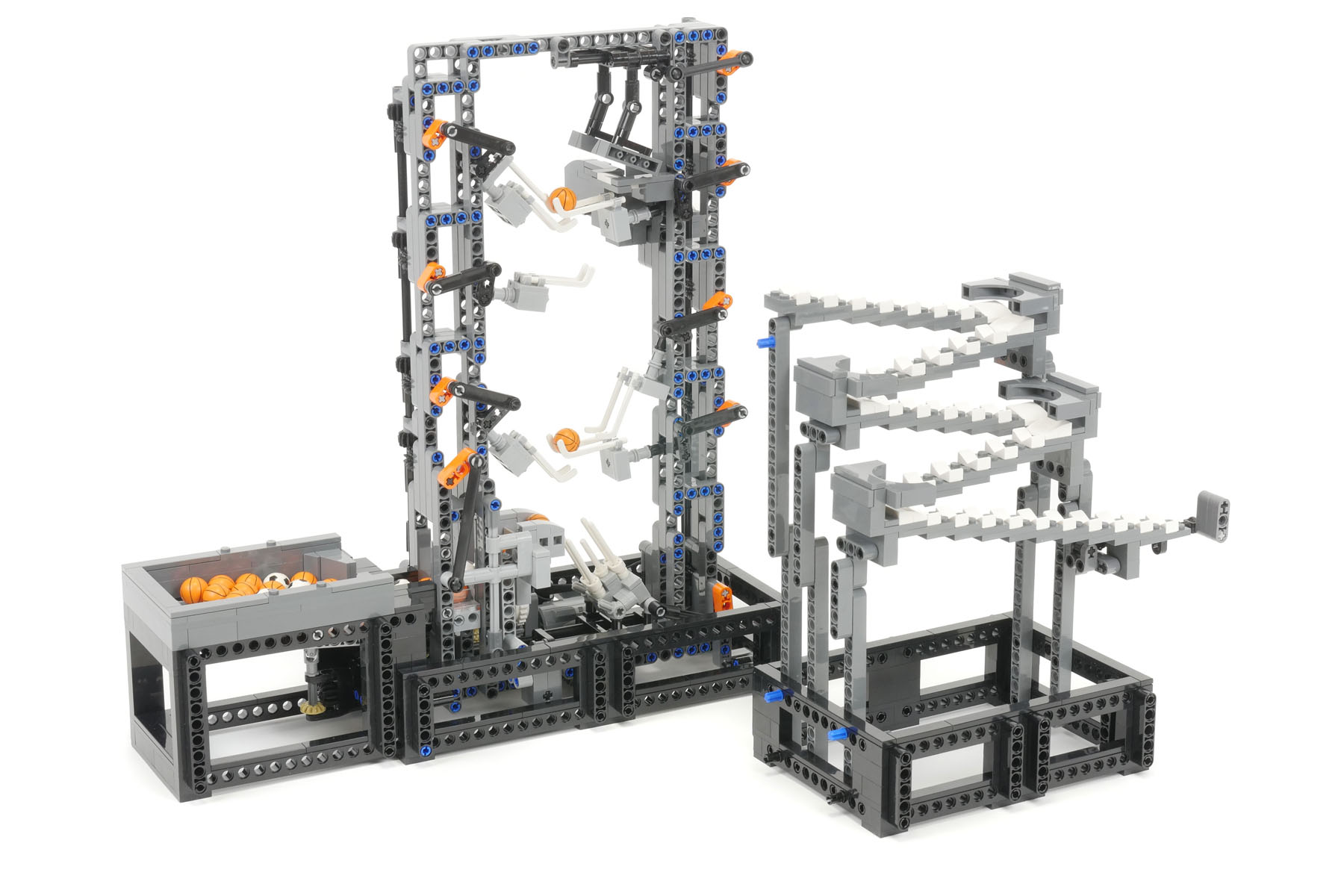
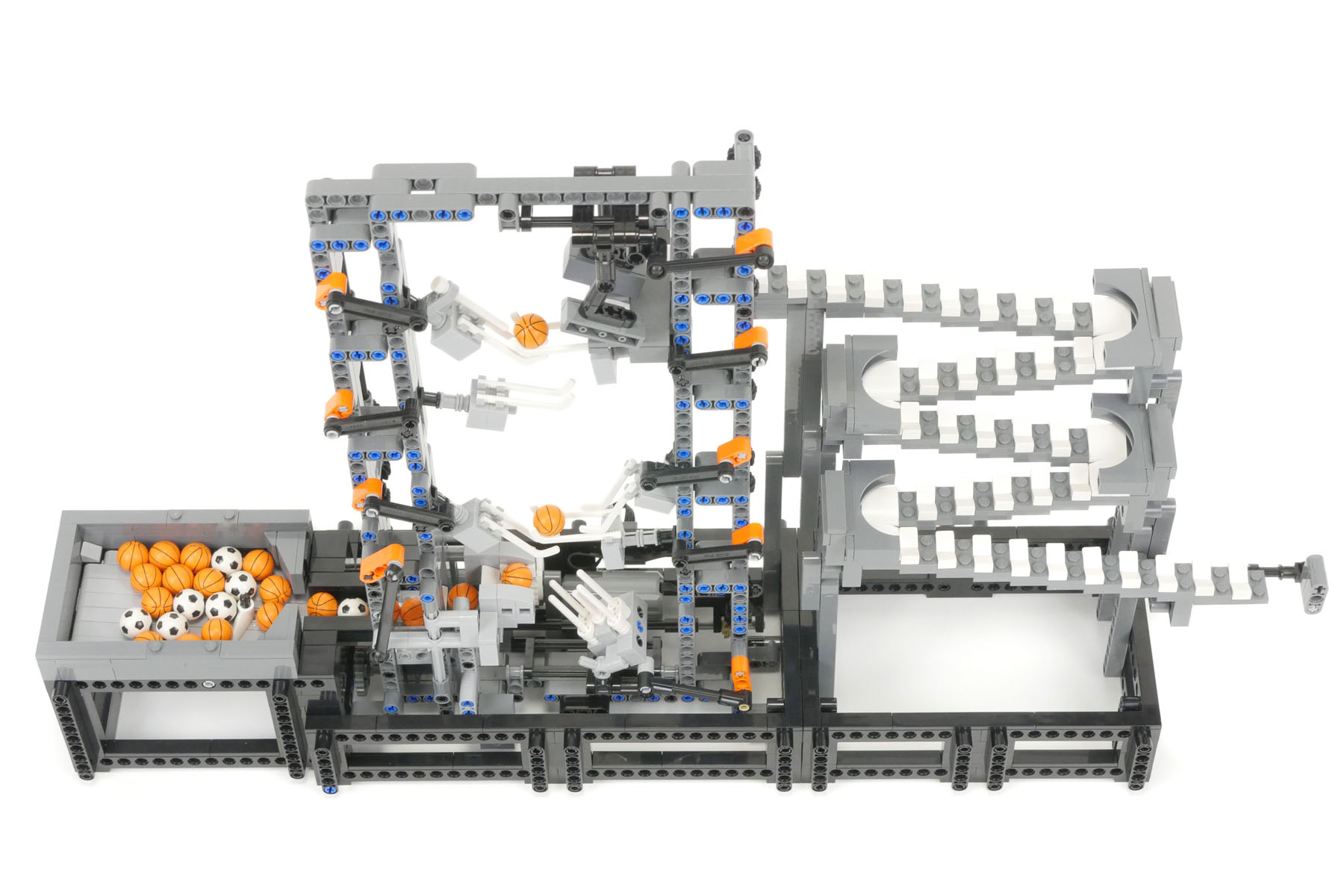
In this GBC module, the hockey stick parts (ice hockey stick, ID 93559) play a proper role in the ball-transfer mechanism. Pairs of hockey stick parts are continuously moved to scoop up and lift the balls. Each pair of hockey stick blades performs a swinging motion, rather than a circular motion. The distance between two hockey sticks facing each other on the left side of the lift is narrower than that on the right side of the lift. Consequently, the hockey sticks can slide past each other without colliding. The ball-transfer mechanism has a compact design, encompassing the top pair of hockey sticks down to the outlet slope of the module.
If you want to build the GBC module “Hockey Stick Lift”
Building Instructions were sold directly on this website until June 2024,
From July 2024, sales will be moved to the following affiliated websites. We have also started to sell kits that include parts as well as building instructions.
Please click on the links below to purchase building instructions and kits.
Started: July 2017
Completed: July 2017
Released: August 2017
The “Cup to Cup GBC module”, which has been one of the regular modules at the GBC exhibition I have been associated with since 2011, now has a sister module. Surprisingly, the hollow curve of a light reflector fits the gibbous curve of a soccer ball perfectly, similar to a socket and bulb. A set of three silver light reflectors received the balls; in the next moment, the balls were received by another set of three silver light reflectors. The Cup to Cup module transferred the balls horizontally; the new module transferred them vertically. This is the evident difference between the two models.
The two different mechanisms generating the up-and-down motion and the tilt motion of the cups are separately located in the rear and both the sides of the module, respectively. The mechanisms are combined to achieve a series of cup movements to transfer the balls vertically; first, the forwarding cups containing the balls exert a lifting motion, and subsequently tilt by a large degree and empty the cups into the cups in the next position, which tilt slightly to receive the falling balls. The mechanical structure of the vertical transfer in the new module is slightly more complex than that of the horizontal transfer in the Cup to Cup GBC module, and it is difficult to adjust the phases of the gears in the new module.
The input part of the new module employs a shortened version of the stepper used in the Cycloidal drive GBC module. An extensive amount of time was required to construct the mechanism to transfer the balls from the stepper to the first cup. The output part of the module uses the “Snake Slide”, the output part of the Fork to Fork GBC module. The Snake Slide has superior flexible connectivity to the subsequent module. My recent modules also employ the Snake Slide.
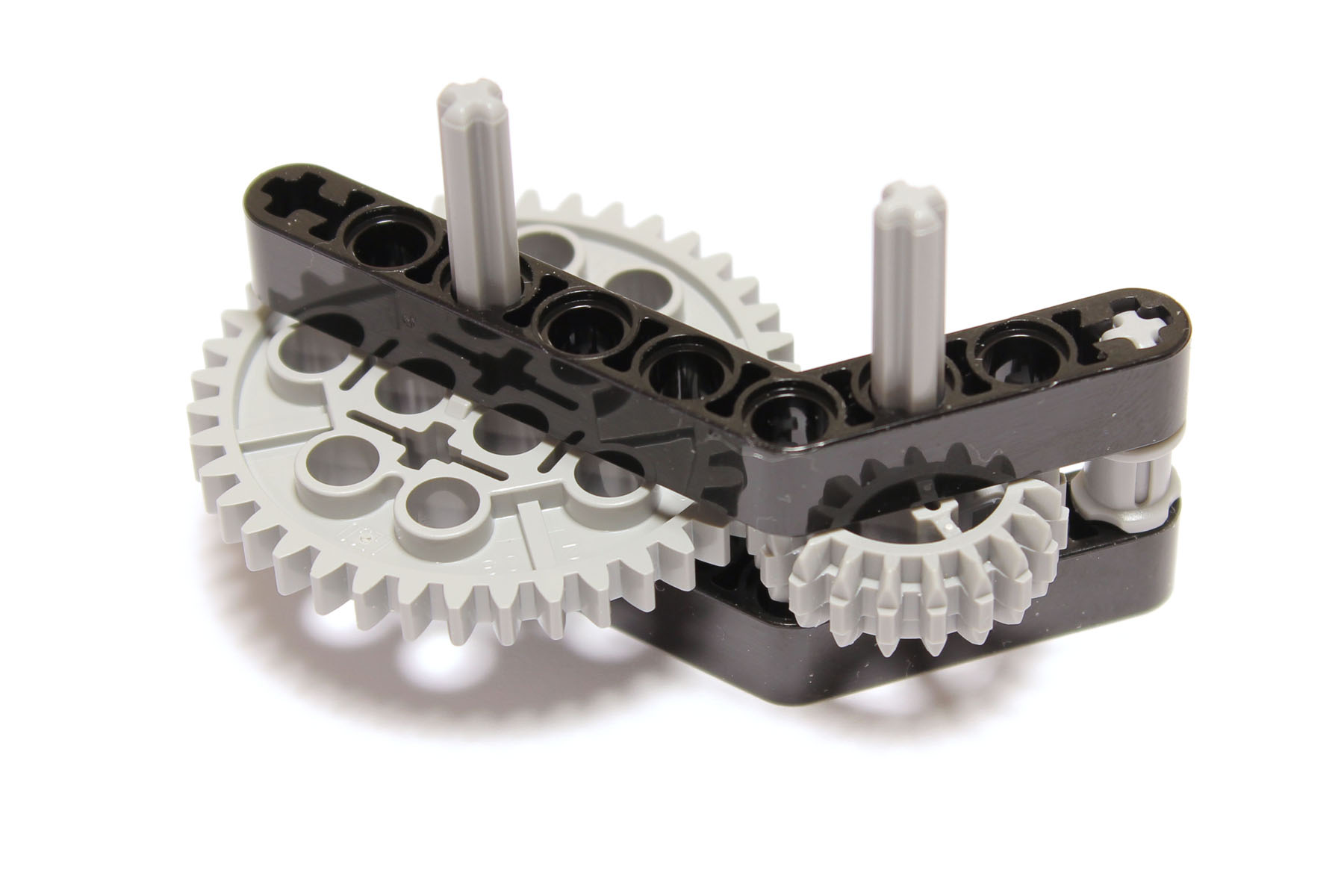
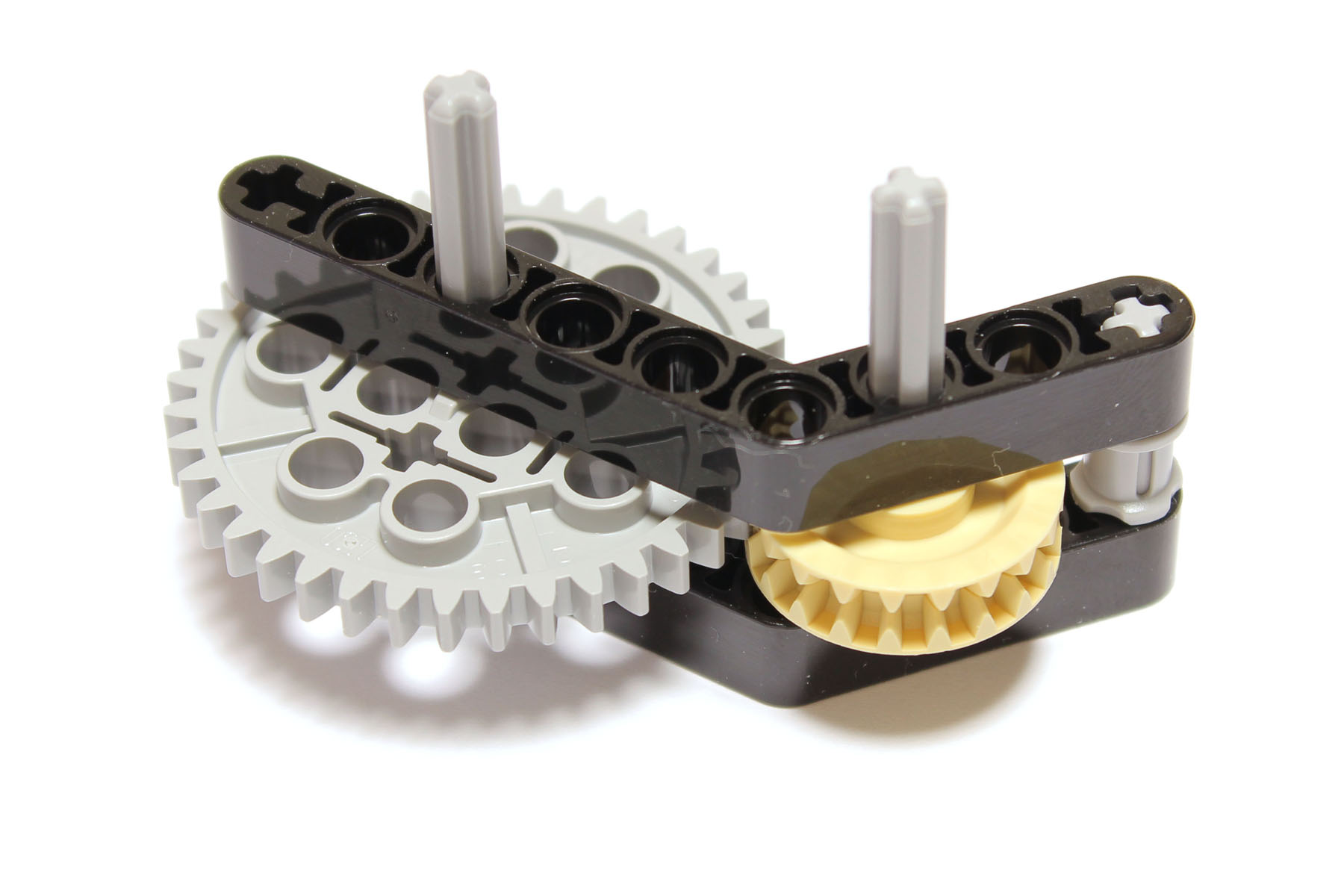
I would like to explain the engagement of the 40-tooth and the 20-tooth gears in this model. The axle distance between the two gears should be 3.75 stud. In this model, the bent lift-arms were used to engage the two gears by a distance of 3.69 stud (see left figure). The distance of 3.69 stud is slightly shorter than expected. Consequently, depending on the variability of the two gears, they are not able to engage smoothly with each other. As a solution, the double 20-tooth bevel gear could be replaced with two single bevel gears (see right figure).
The new module was constructed to occupy a smaller space with regard to the neighboring modules at the GBC exhibition. In future, I want to place a larger number of modules on each table and organize a dynamic GBC exhibition.
The working of the module is smooth and stable, while the balls occasionally fall from the cup when the motion of the module temporarily ceases.