製作開始:2016年3月
完成:2016年7月
公開:2016年11月
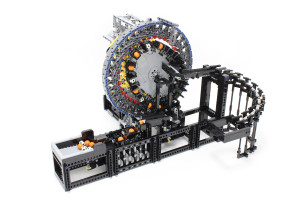

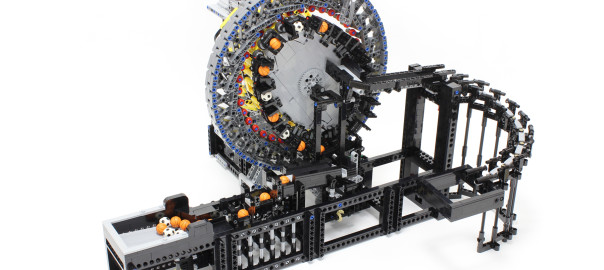
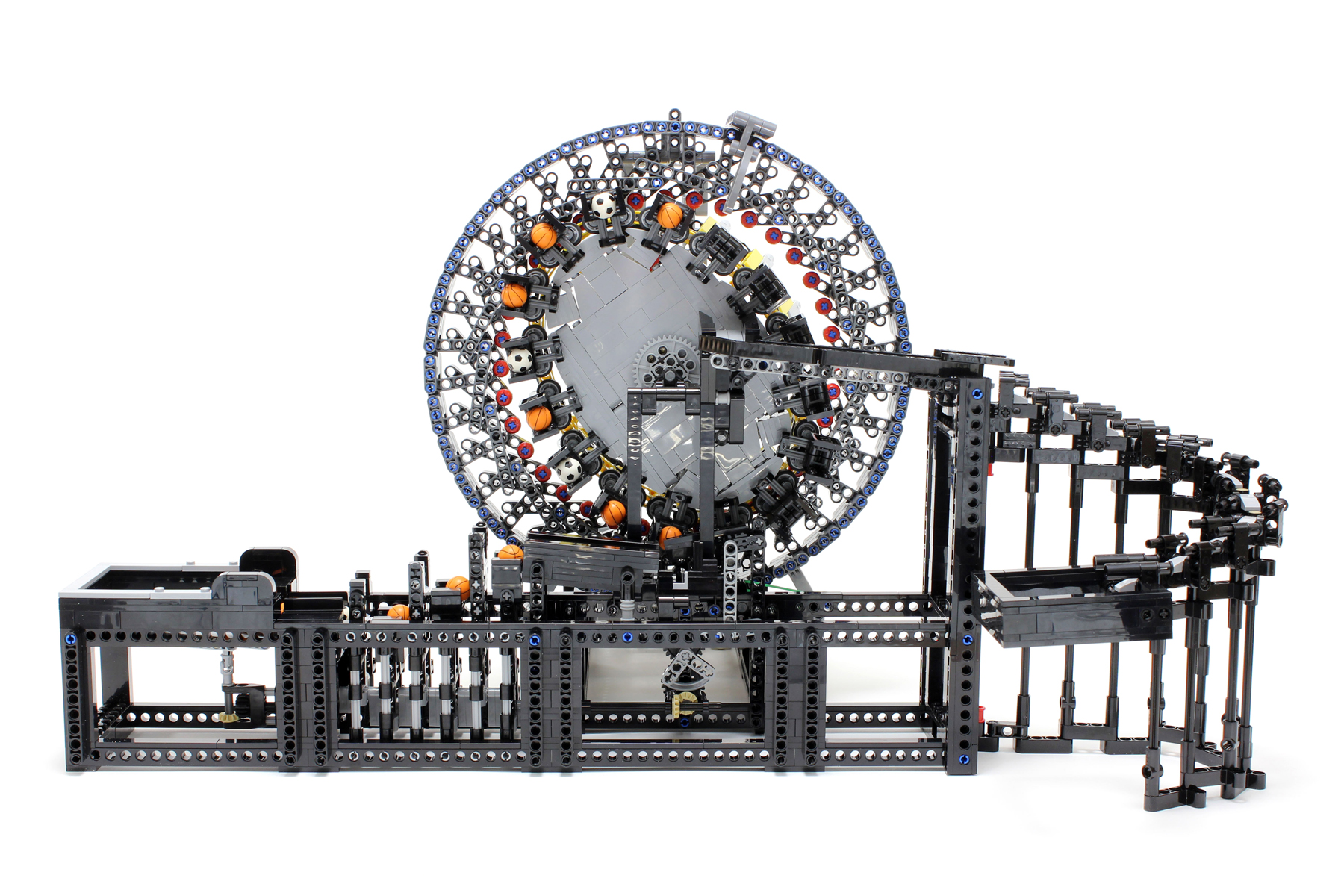
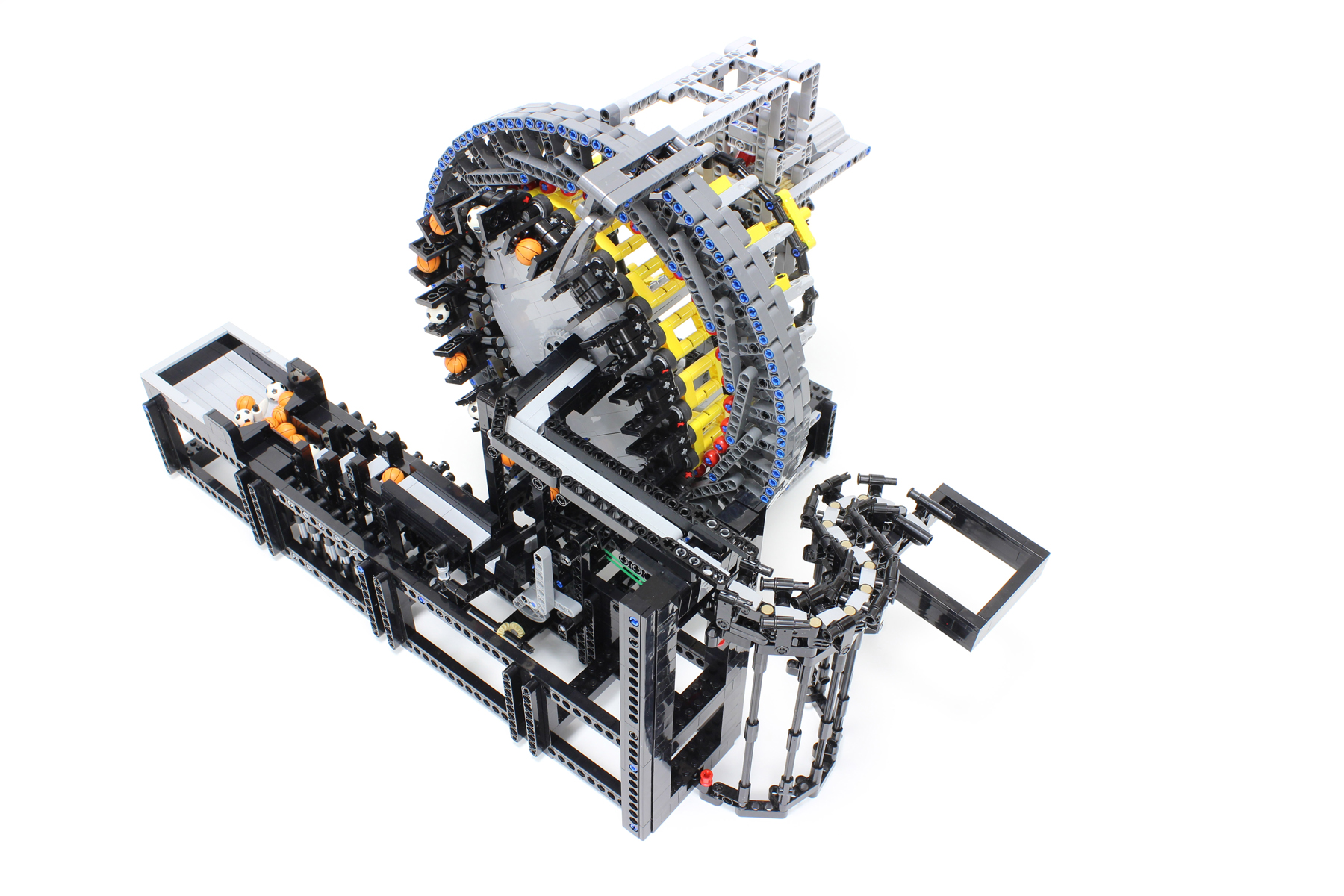
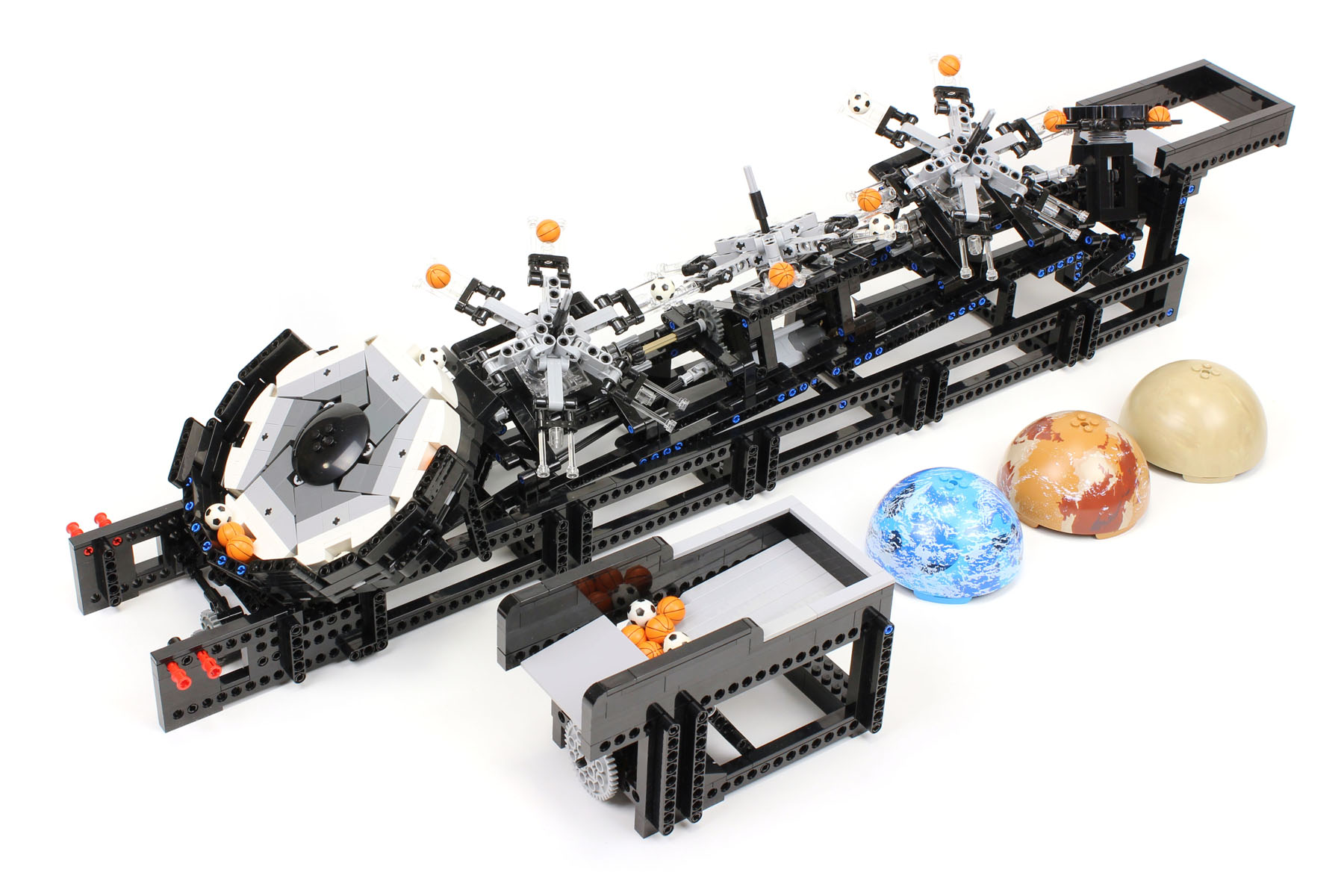
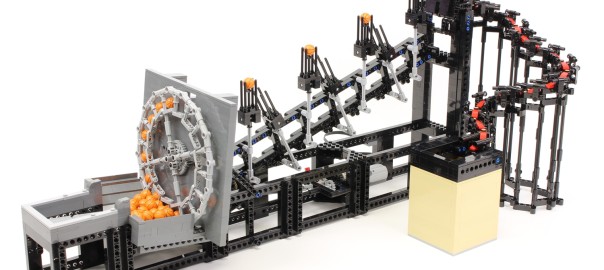
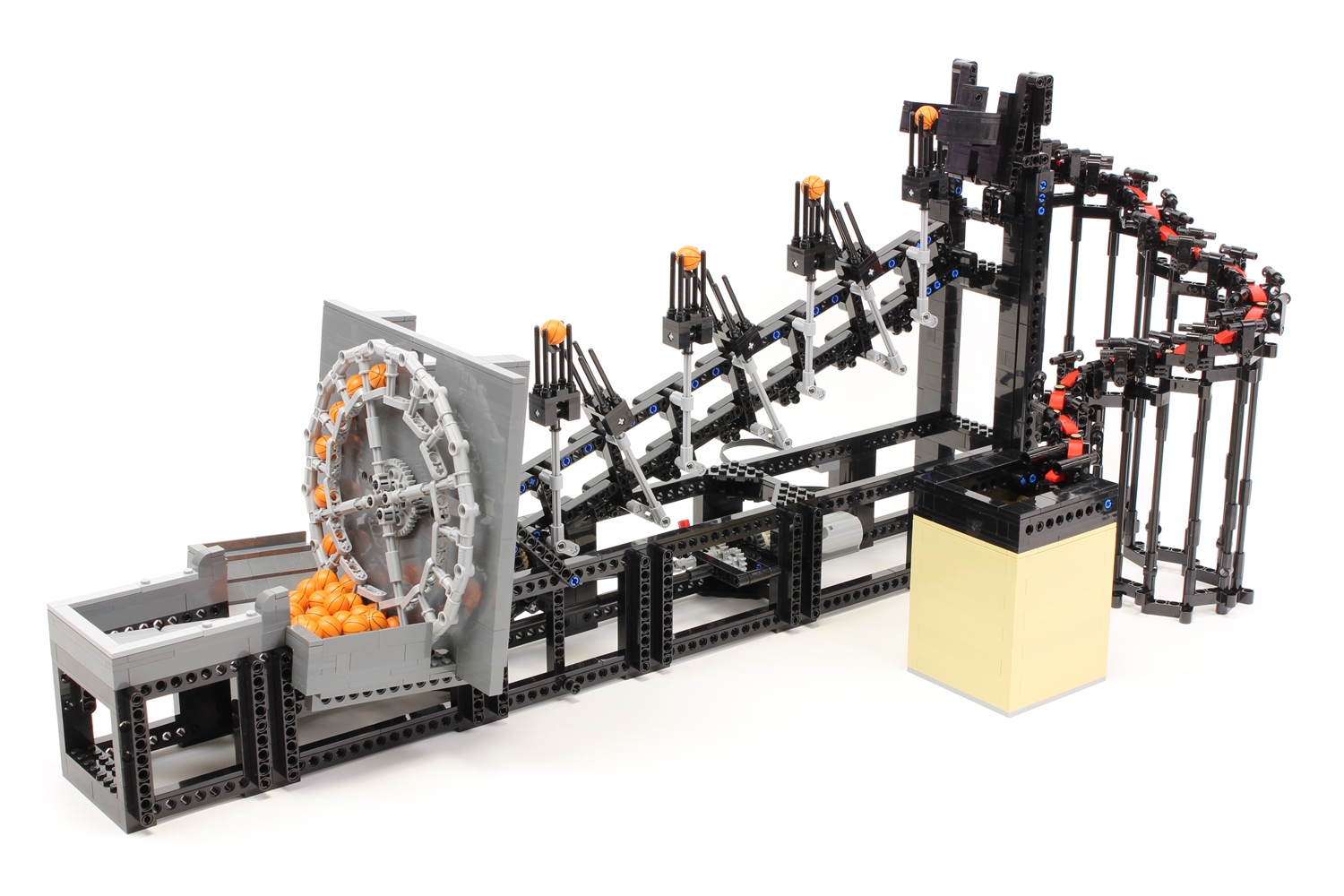
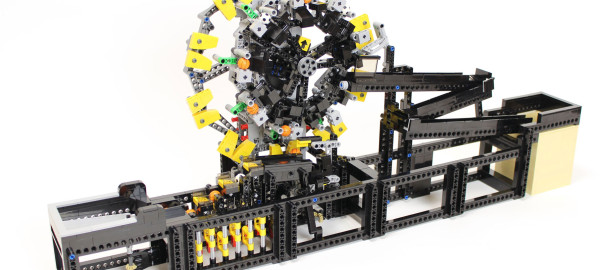
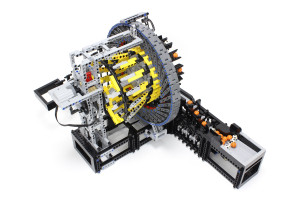
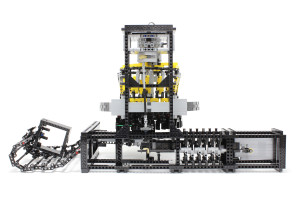
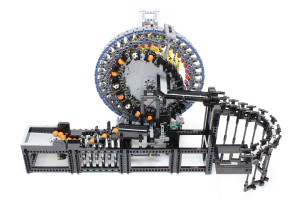
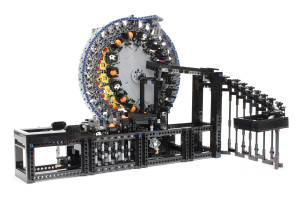
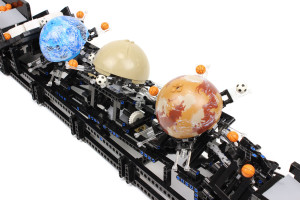
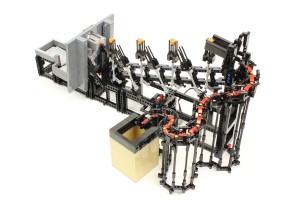
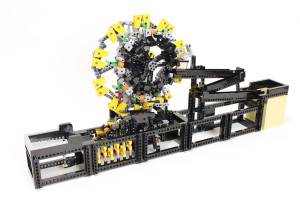
波動歯車装置の機構を使用したGBCモジュール作品です。2012年に製作した波動歯車装置の模型をベースとしています。波動歯車装置は産業用途等で使用される減速機で、ハーモニックドライブ・システムズ社の製品が有名です。この機構をGBCモジュール化する構想は以前から持っていましたが、実現がすることが難しく作品を完成させるまで時間がかかりました。
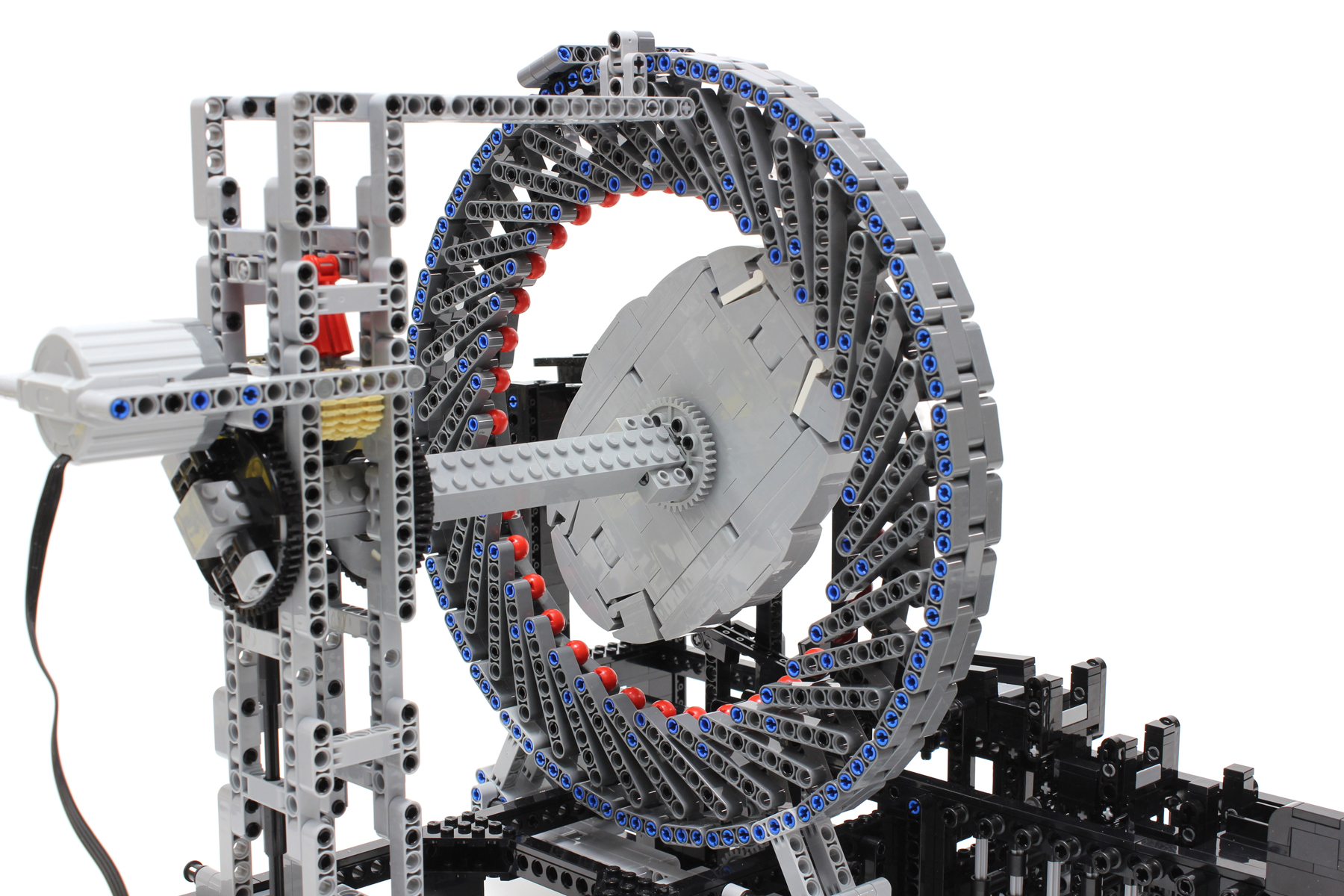
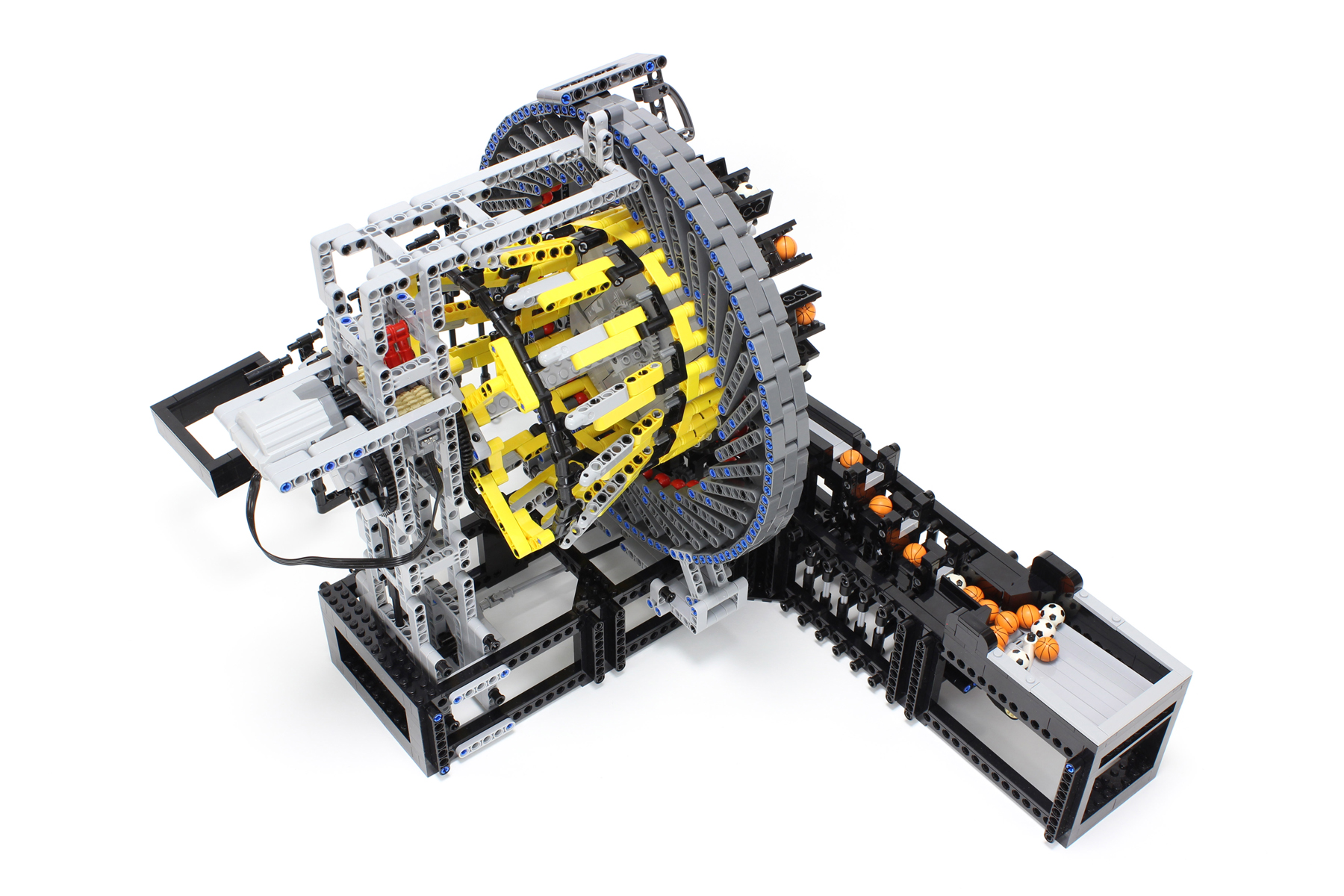
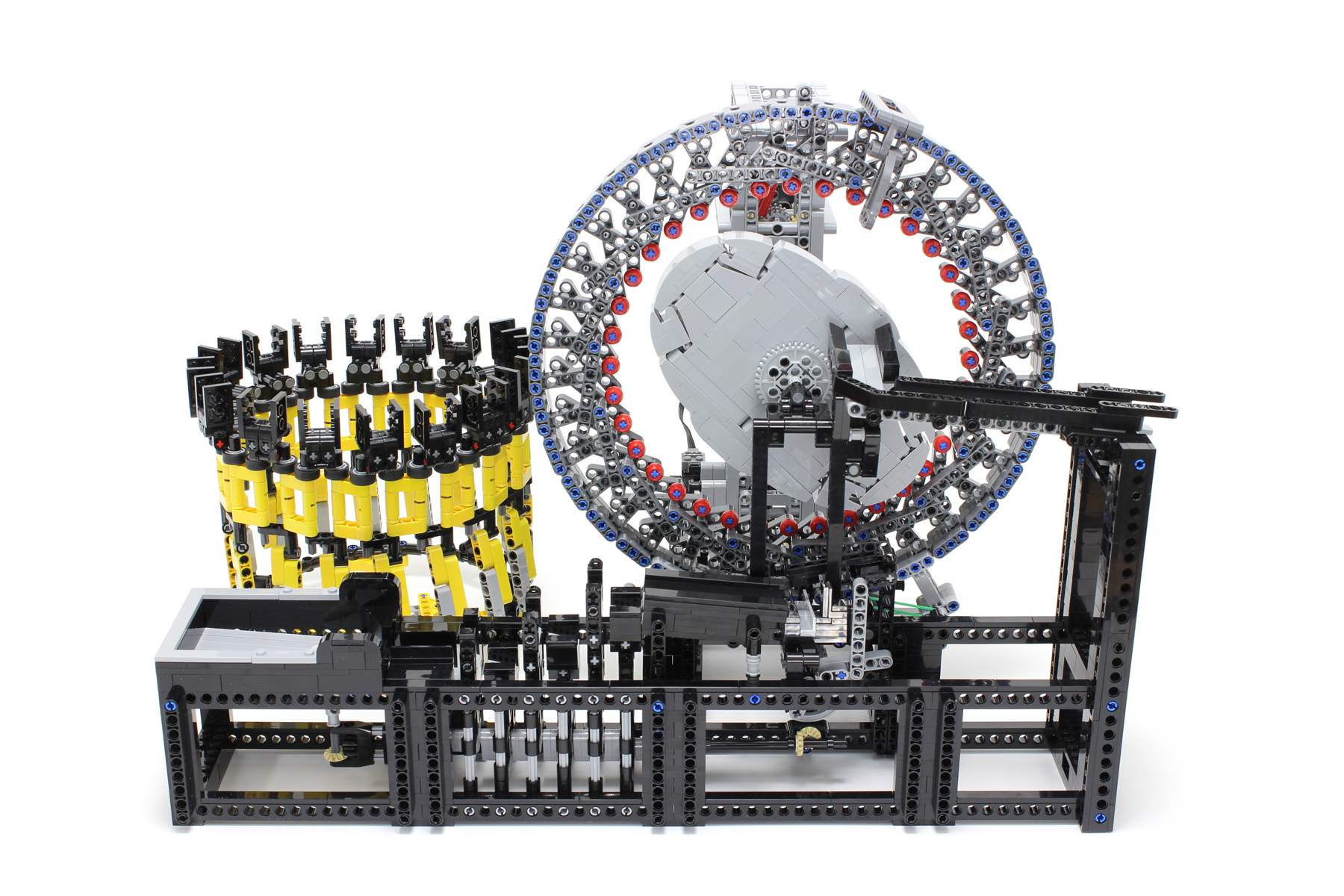
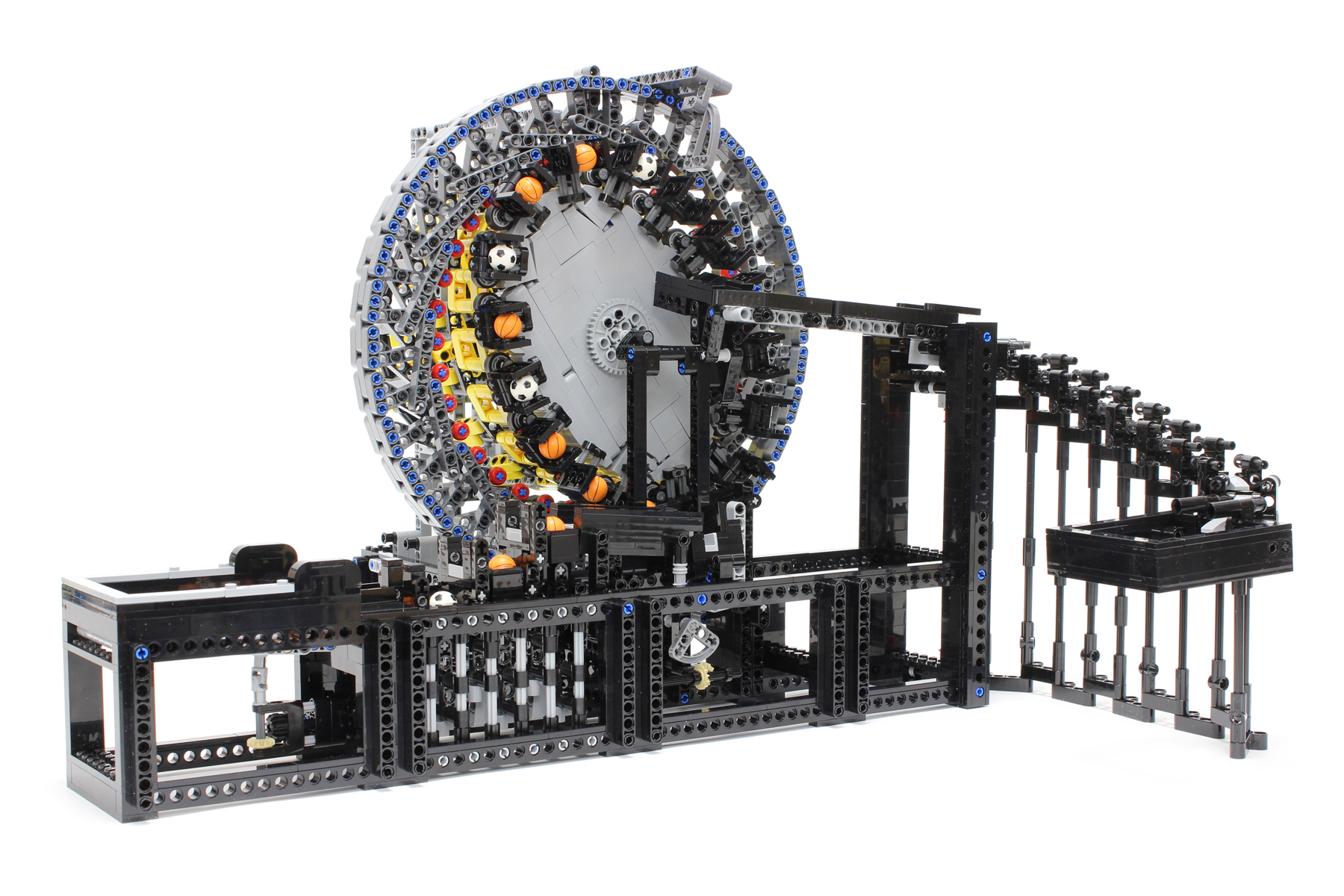
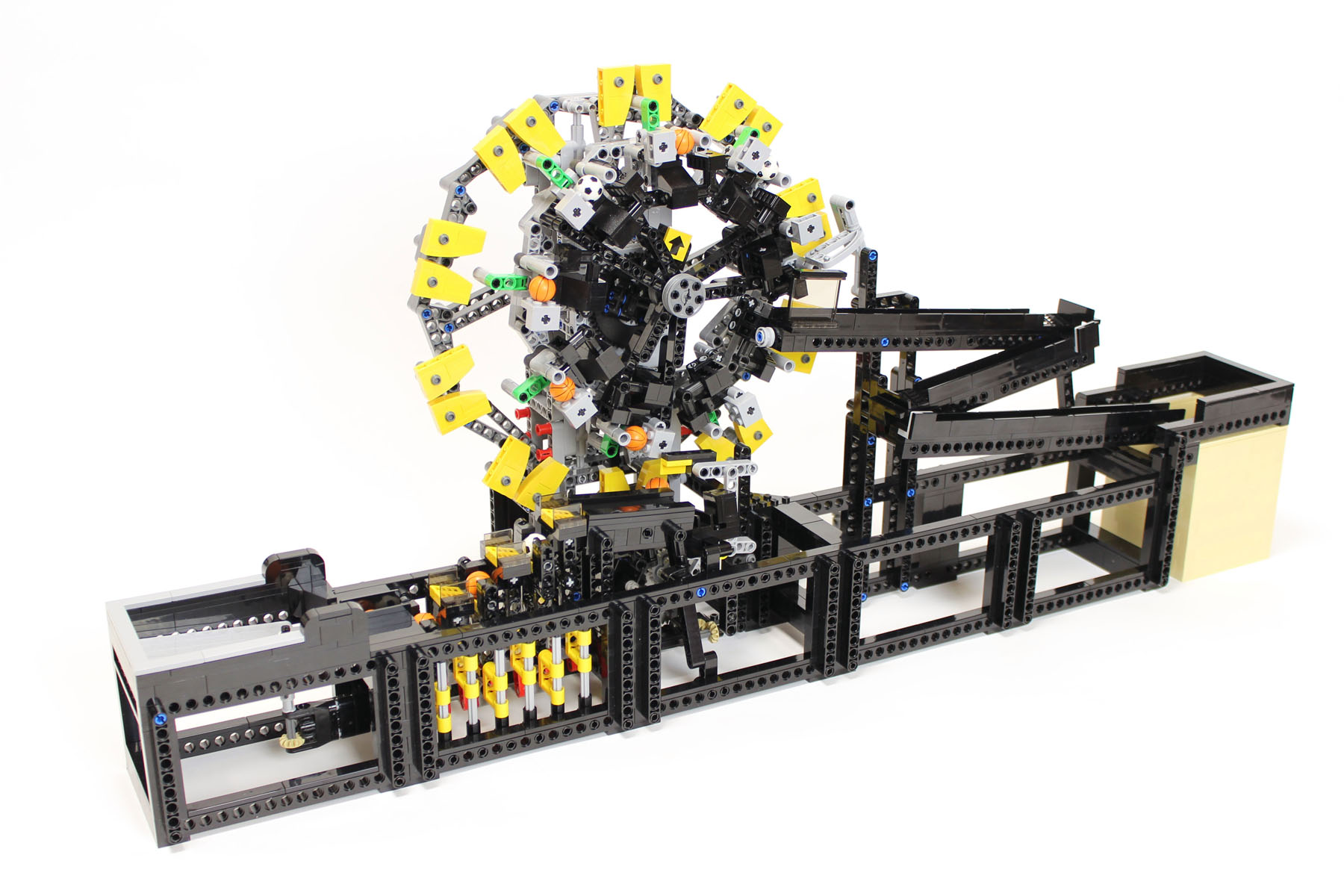
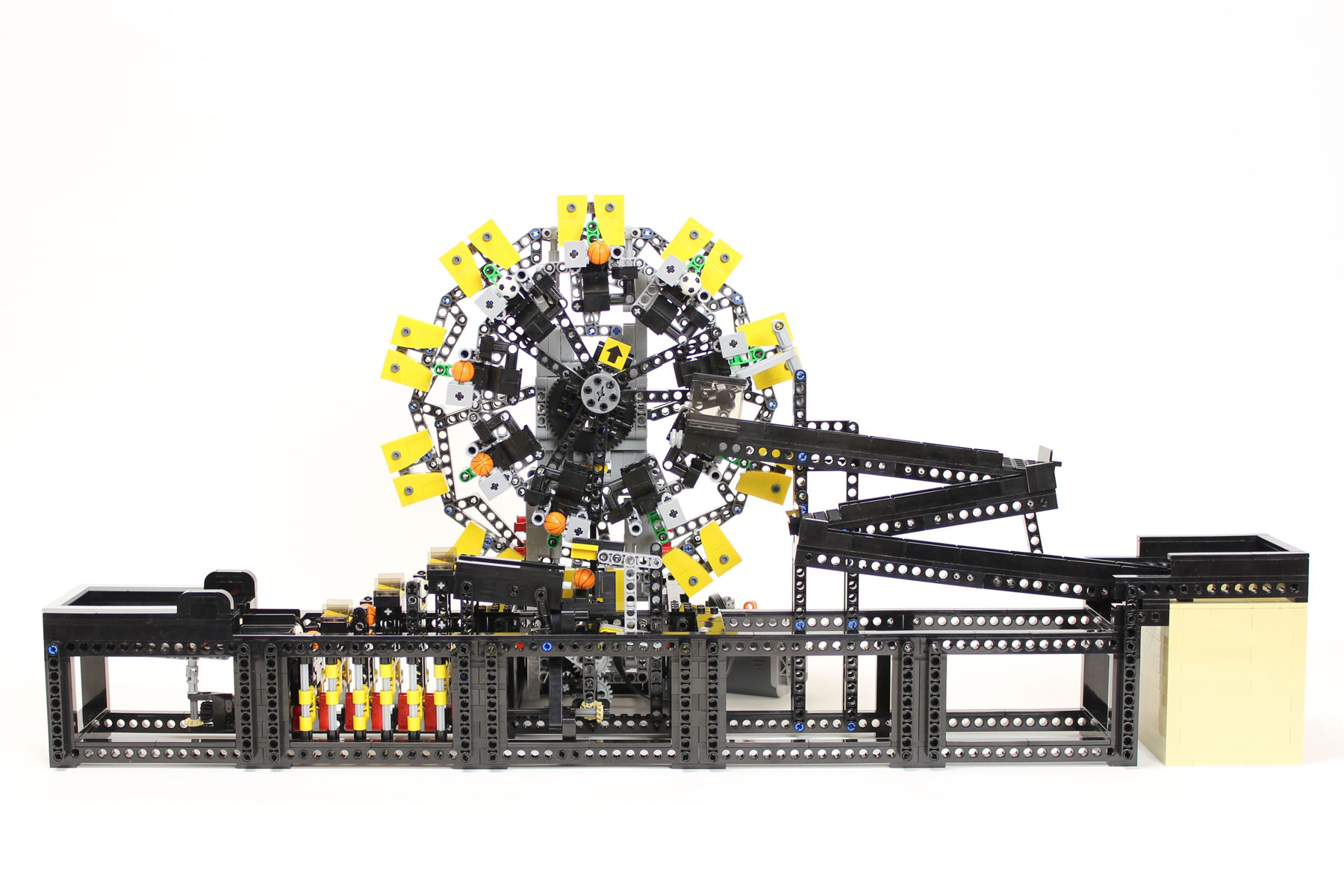
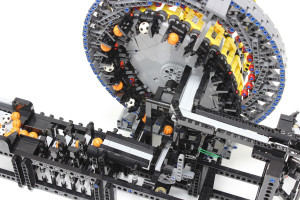
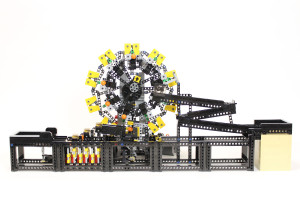
波動歯車減速機はウェーブジェネレータ、フレクスプライン、サーキュラスプラインの3つの部品から構成されます。このモデルでは、中央の灰色の楕円体がウェーブジェネレータ、黄色いカップの部分がフレクスプライン、外側のダークブルーイッシュグレーの部分がサーキュラスプラインにそれぞれ対応しています。
フレクスプラインの歯数は32、サーキュラスプラインの歯数は36です。これを減速機としてみると、減速比は、(サーキュラスプライン歯数-フレクスプライン歯数)/フレクスプライン歯数=(36-32)/32=1/8となります。ウェーブジェネレータが入力軸、フレクスプラインが出力軸となります。回転方向は逆向きになります。ウェーブジェネレータが8回転すると、フレクスプラインが逆方向に1回転します。
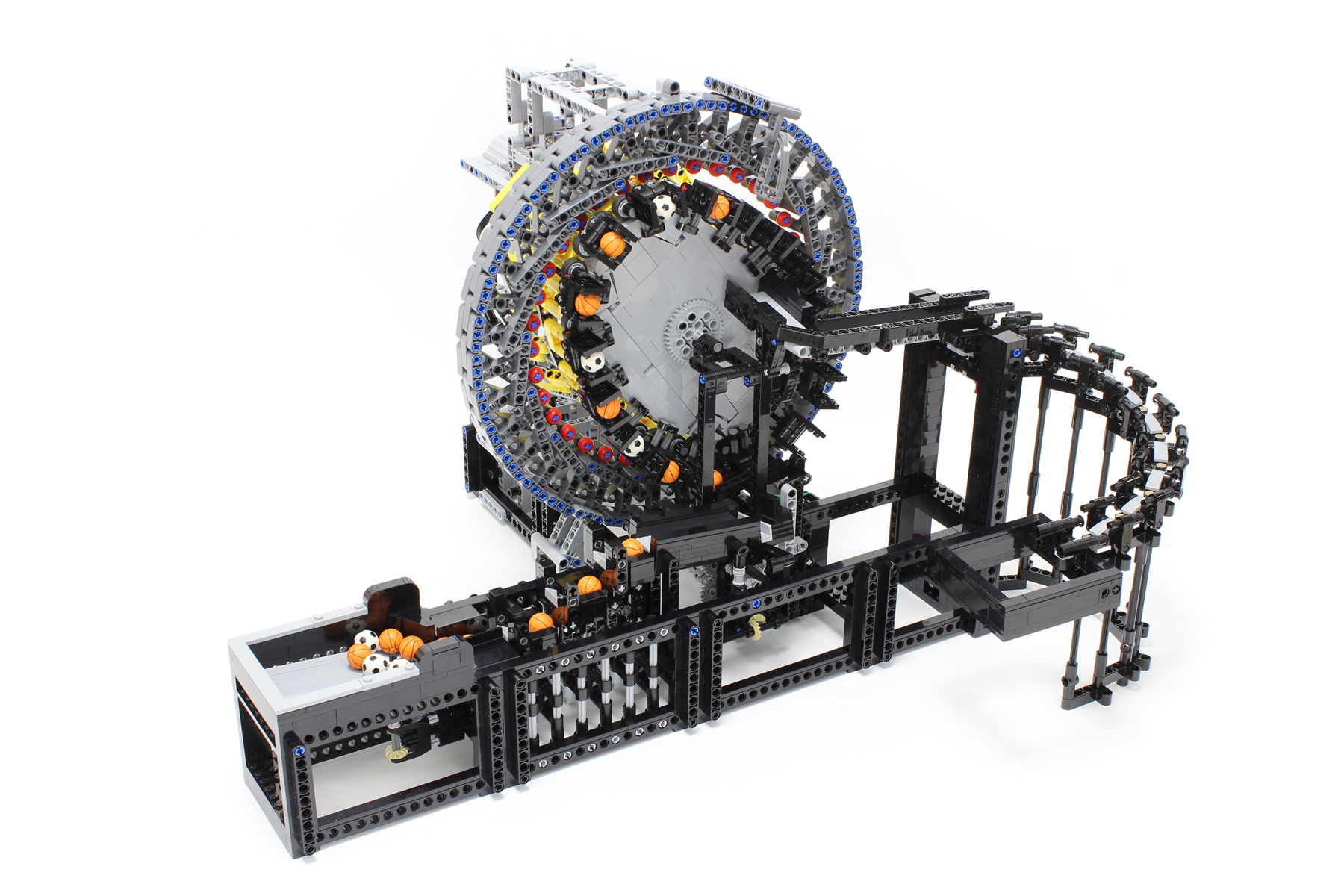
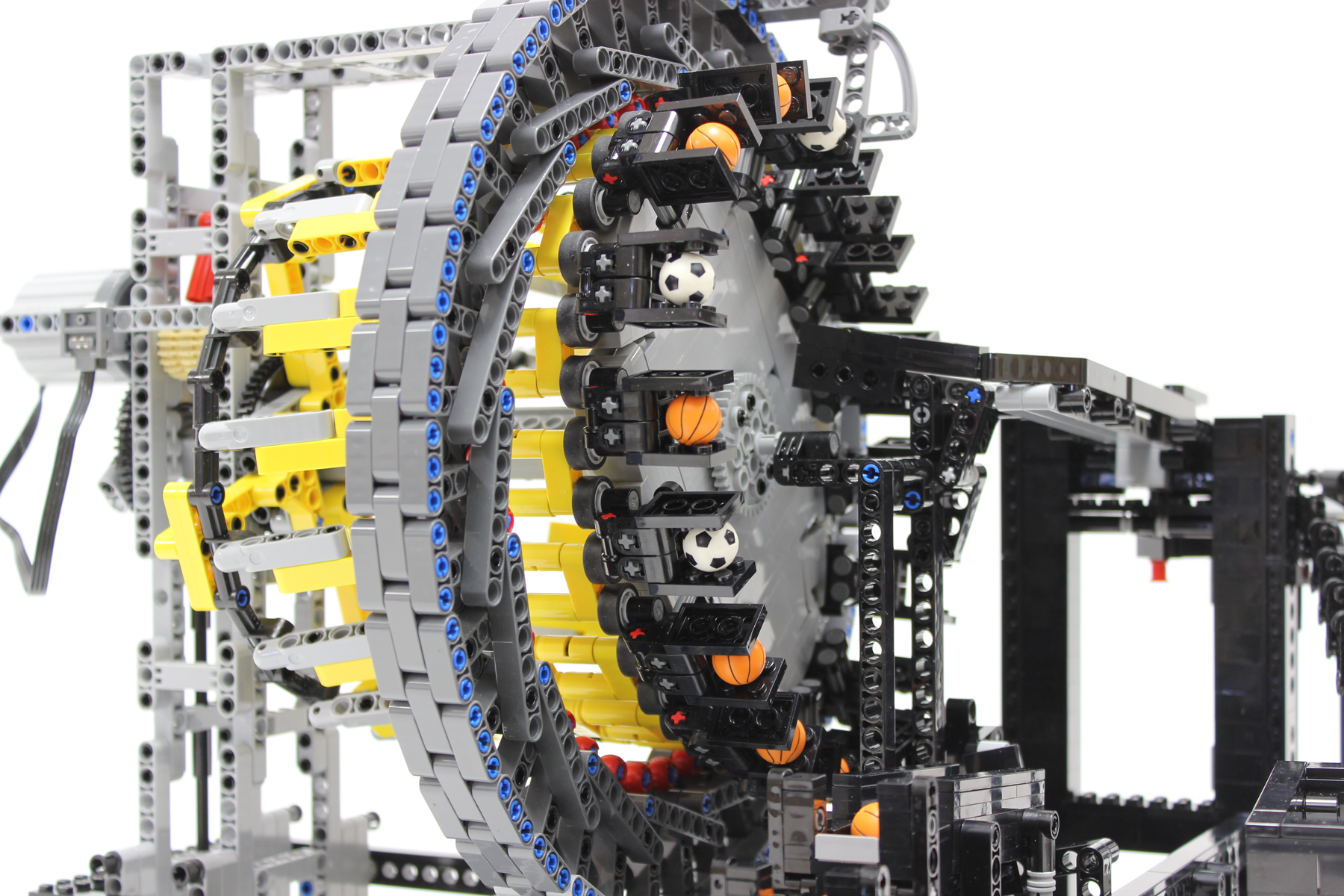
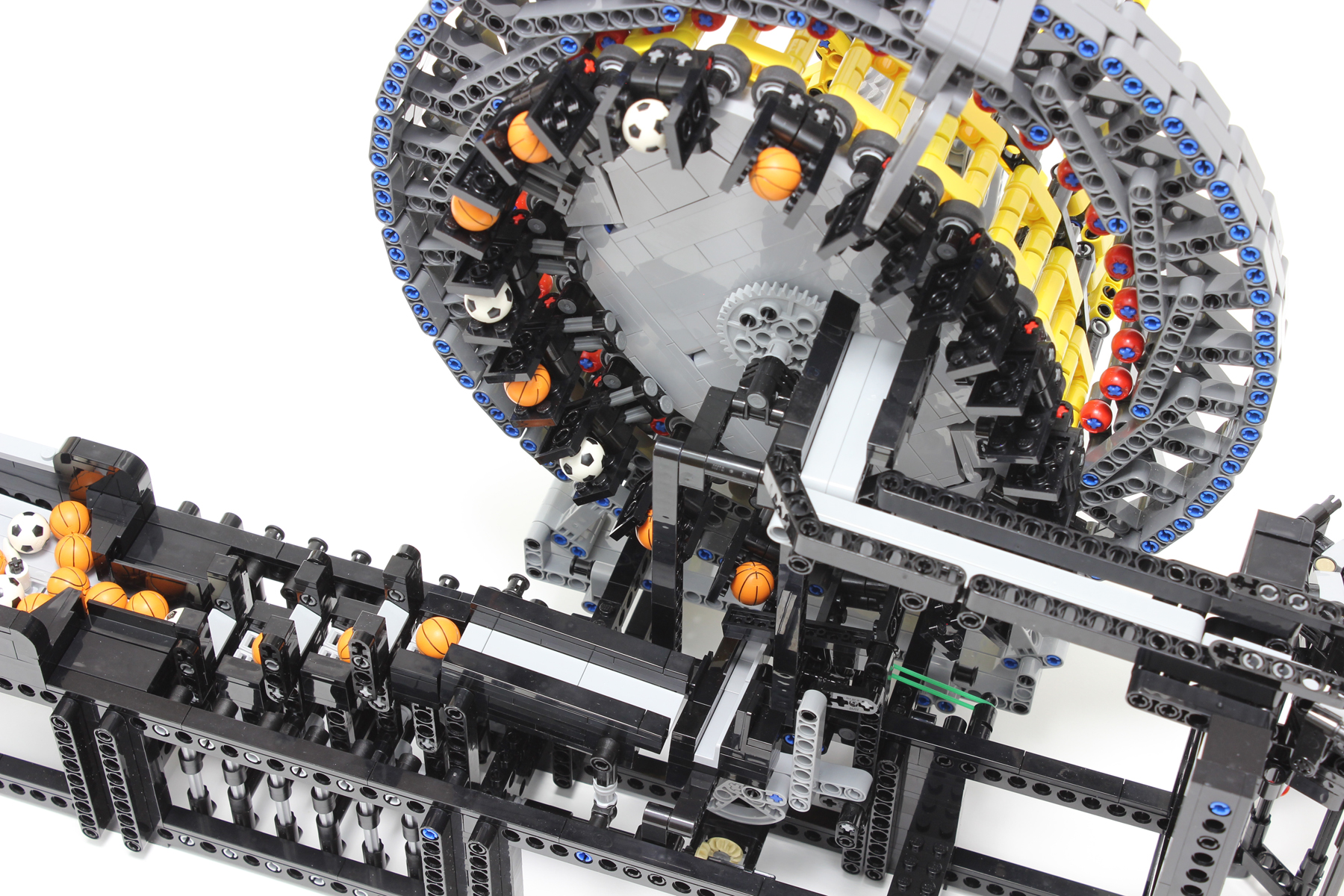
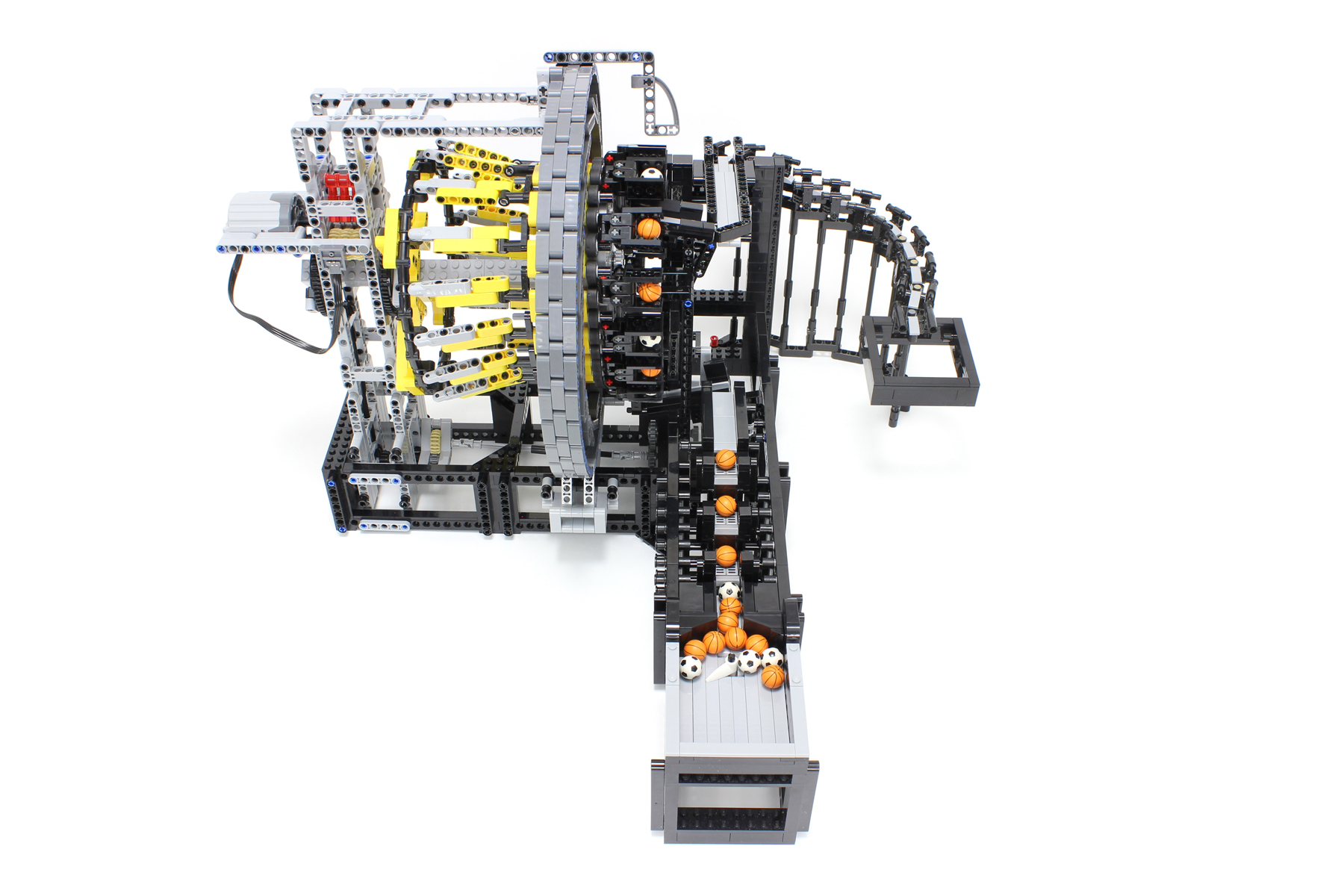
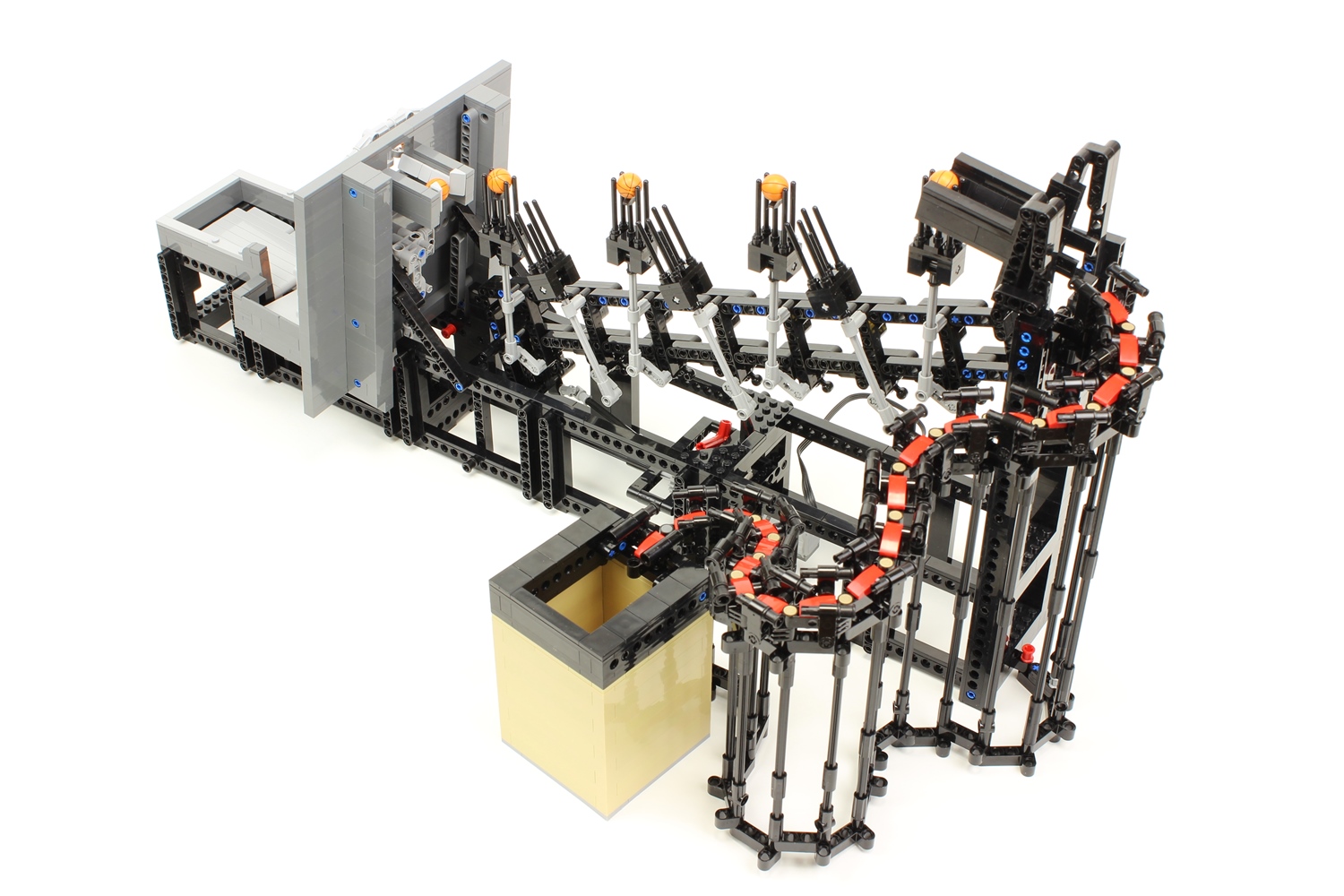
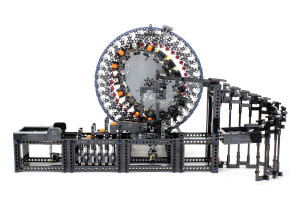
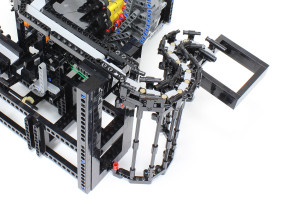
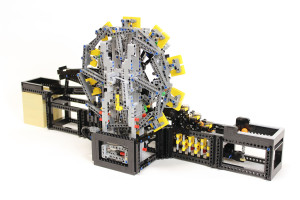
興味を持った機構をGBCモジュールに応用するときには、ボールの動きがその機構の特徴を表すように工夫します。今回は波動歯車装置の機構をGBCモジュールに応用するにあたり、フレクスプラインのうねるような動きをボールの搬送に利用しました。これは、 歯車装置がフレクスプラインの減速された回転運動のみを出力として利用するのと異なります。
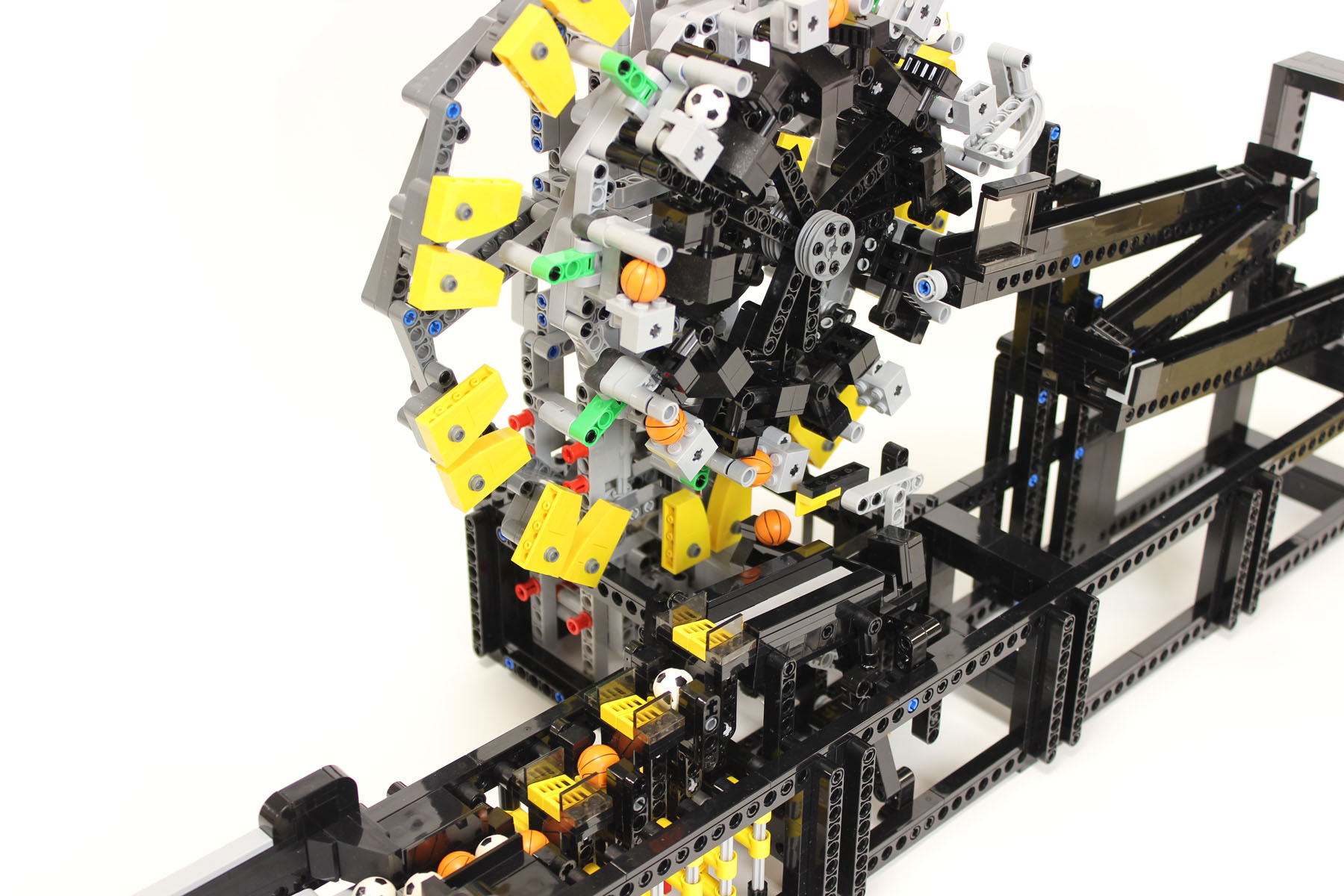
今回のモジュールでは、フレクスプラインのうねる部分にボールを把持するチャックを付け、フレクスプラインの動きに合わせてボールが運ばれるようにしています。フレクスプラインのうねるような動きにあわせてボールが搬送されるのが、このモジュールの見どころだと思います。
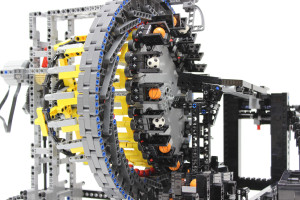
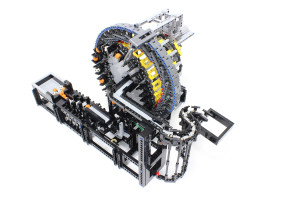
フレクスプラインとサーキュラスプラインの歯数差は4としました。これは、ボールを把持するチャックの間隔(=4スタッド)に、ウェーブジェネレータが180°回転した時のフレクスプラインの移動量を一致させるためです。


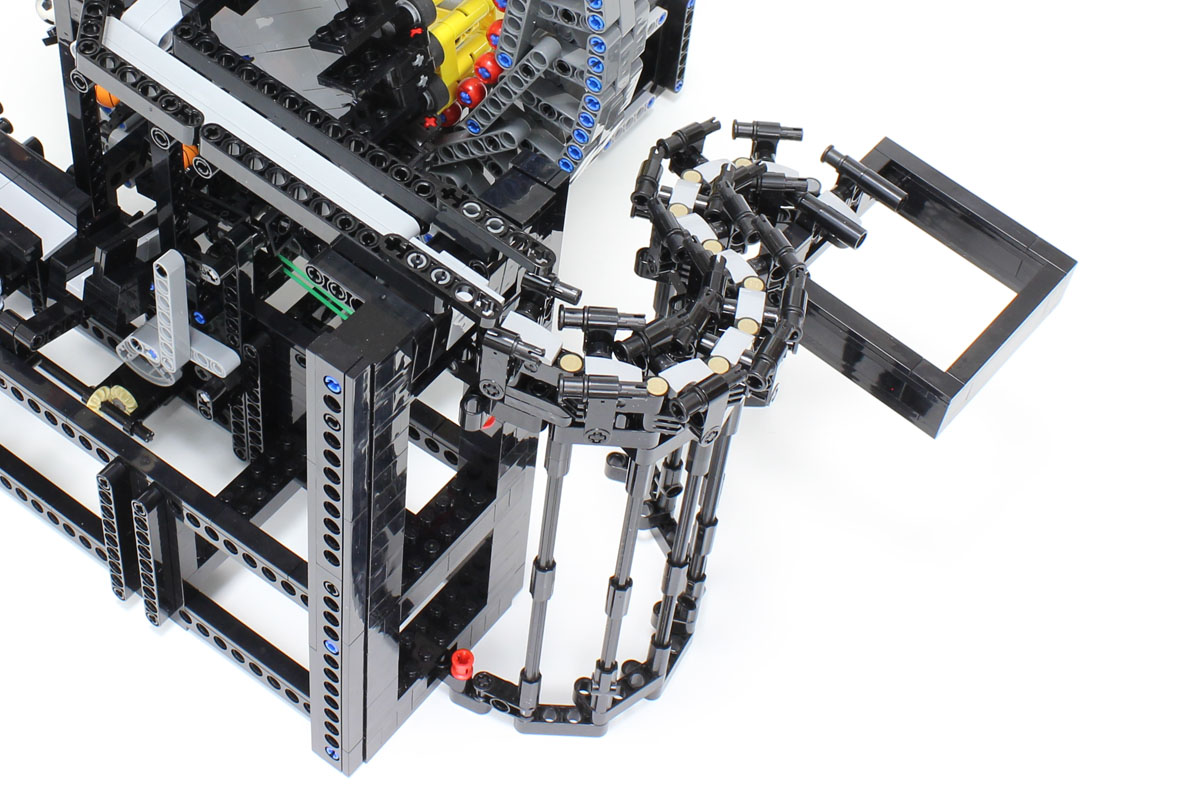
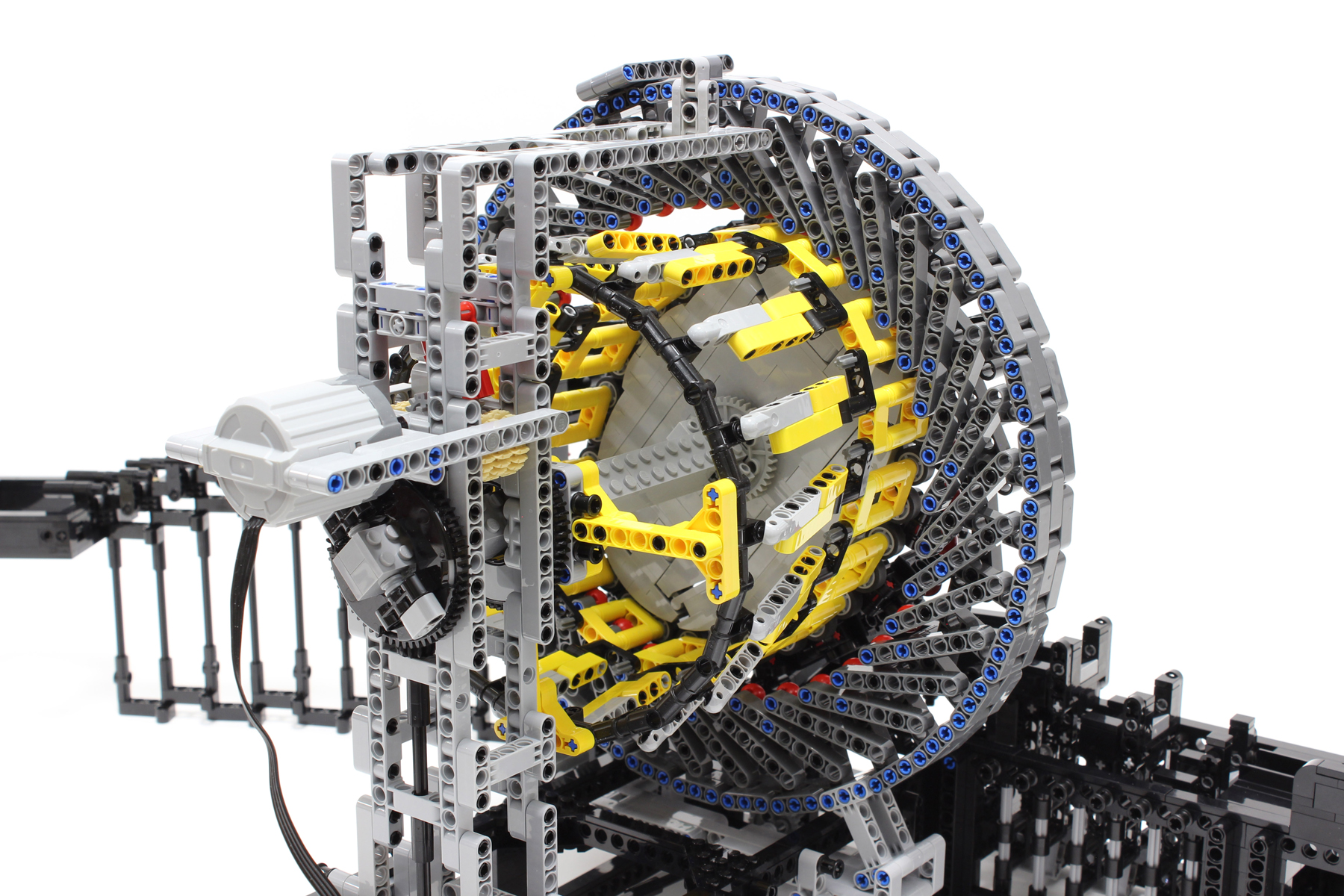
フレクスプラインを取り出したところです。フレクスプラインは楕円に変形できるようにやわらかく作る必要があります。今回は波動歯車装置としては減速比が小さい(1/8)ため、フレクスプラインの変形量はさらに大きくなります。この大きなひずみを吸収できるようにボールジョイントを使いました。このような変形する部分を作るのには、レゴブロックの弾力が役立っています。フレクスプラインがウェーブジェネレータと接触する部分にはローラーを取り付け、摩擦を減らしています。ボールを把持するチャックは、なるべくコンパクトになるように努力しました。チャックがボールを把持した時のチャックのひずみを、長さ4のストッパー付きシャフトが吸収しています。
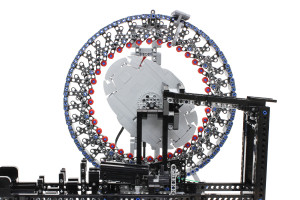
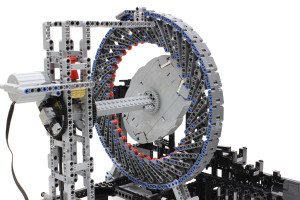
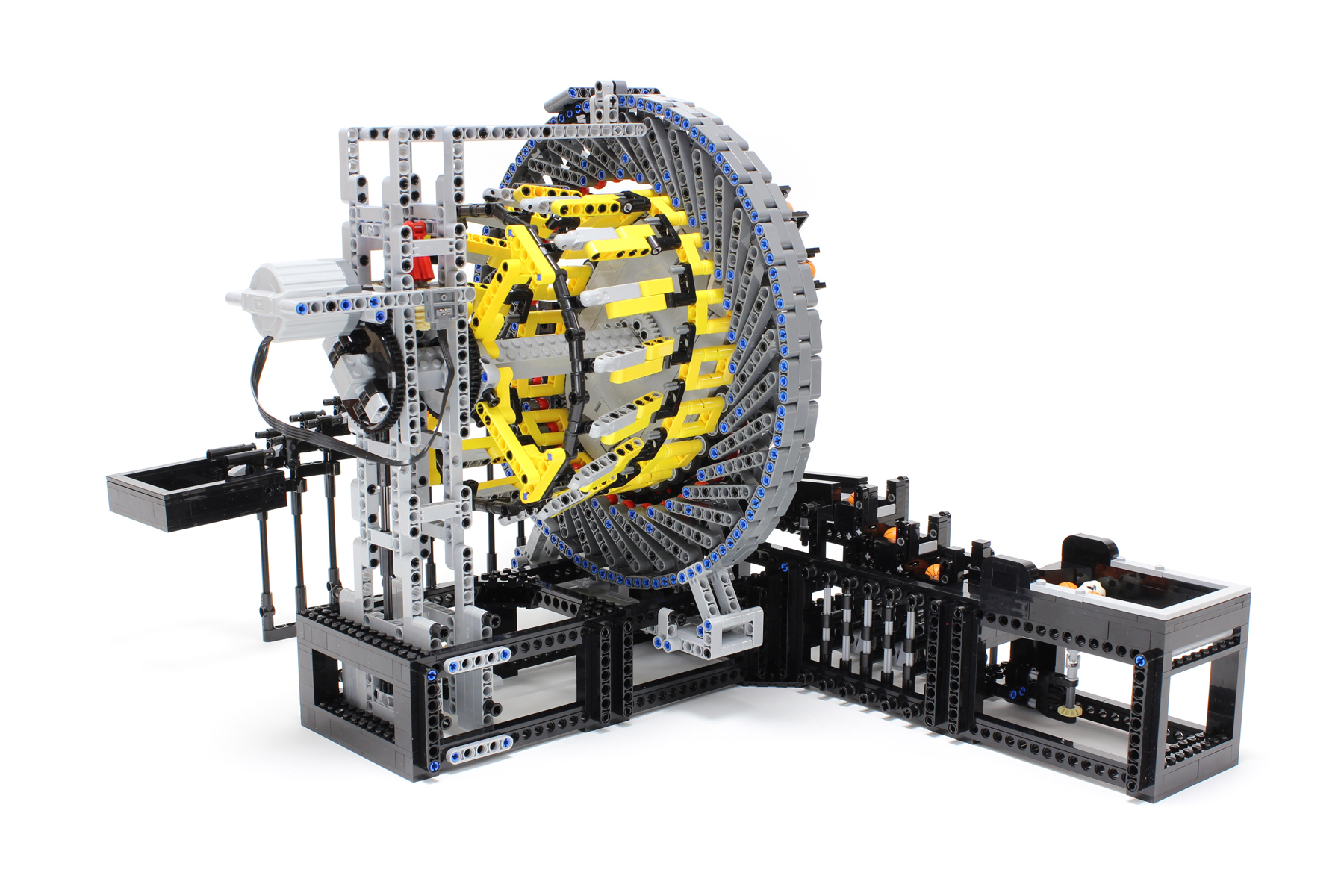
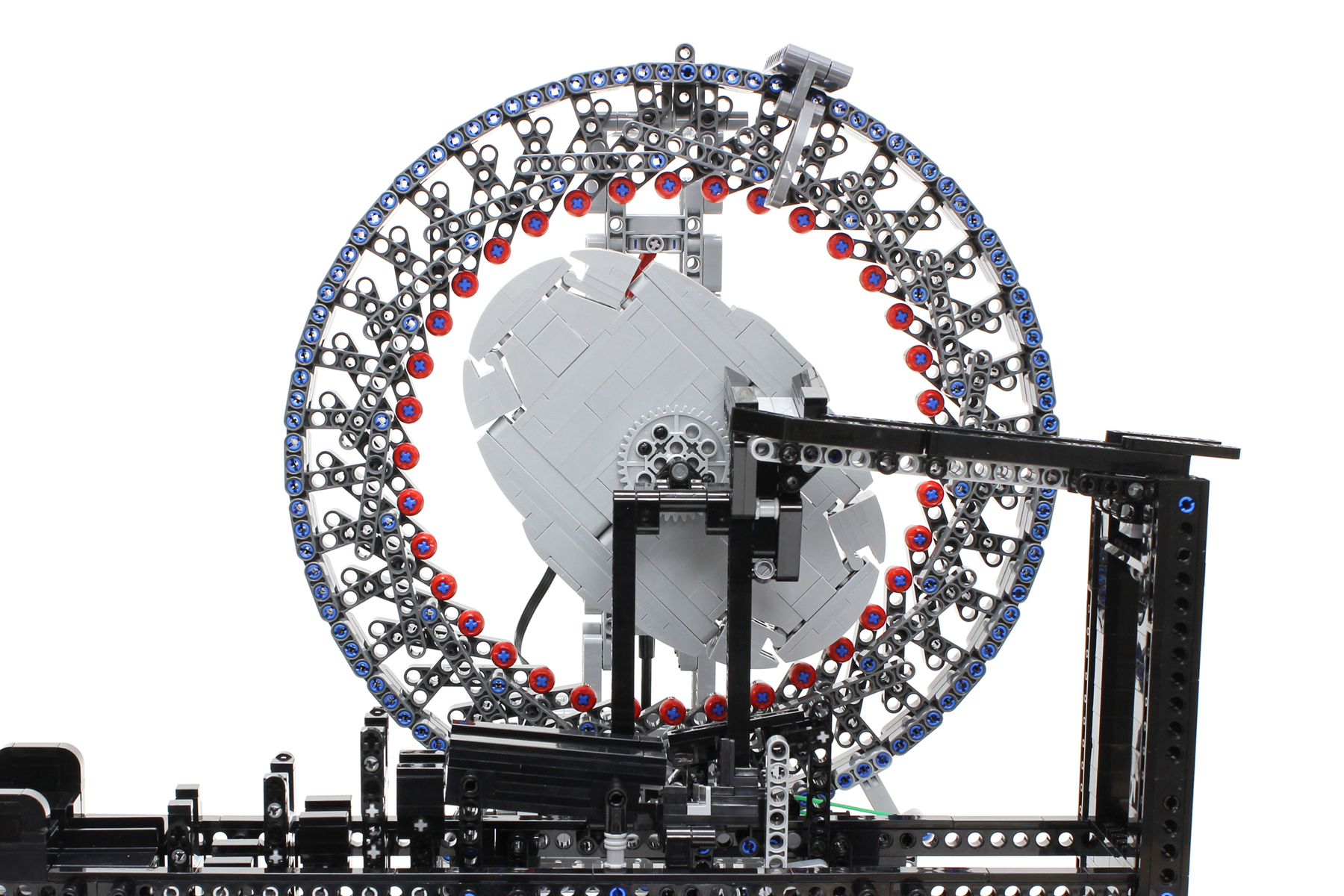
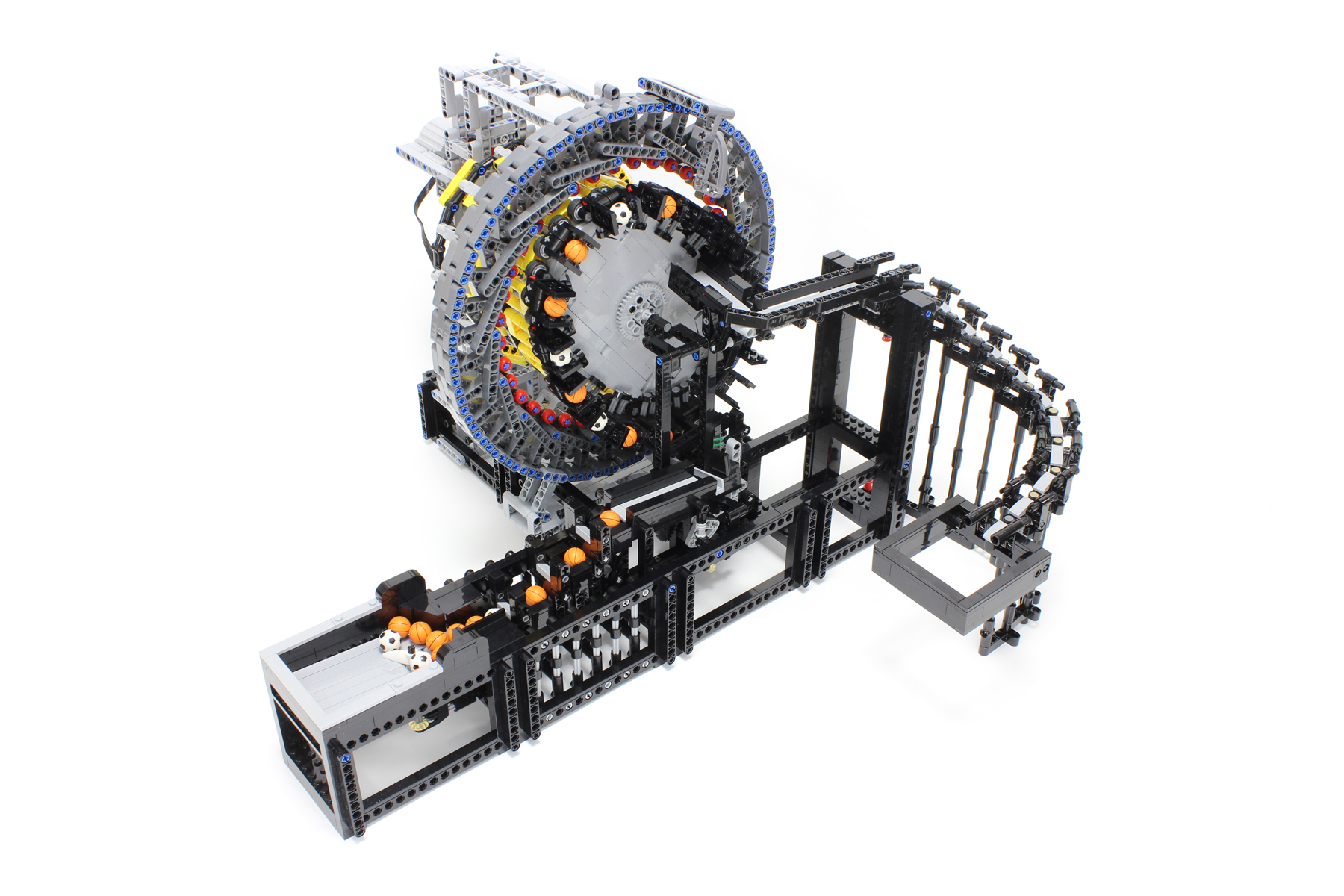
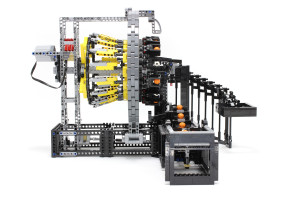
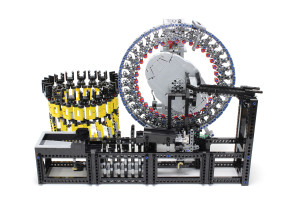
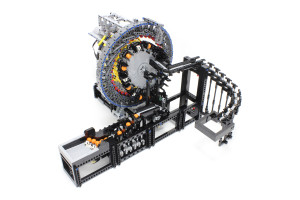
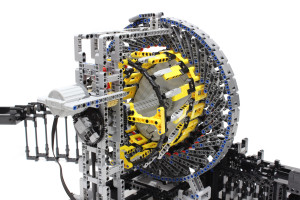
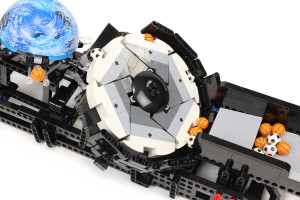
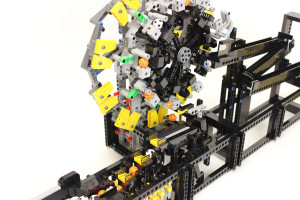
減速機からフレクスプラインを取り外して、ウェーブジェネレータとサーキュラスプラインがよく見えるようにしたところです。中央の灰色の楕円体がウェーブジェネレータ、外側のリングがサーキュラスプラインです。
サーキュラスプラインの内側に並んでいる赤色の丸いパーツがギヤの歯になっています。この歯がフレクスプラインと噛み合います。サーキュラスプラインはこのモジュールで最も設計に苦労した部分です。サーキュラスプラインはフレクスプラインとは対照的になるべく変形しないように作る必要があります。サーキュラスプラインには内側から押し広げる力が加わります。均等な36個の歯を持ち、十分な剛性があり、かつ見た目が美しい組み方を見つけるまでたくさんの試作が必要でした。
ウェーブジェネレータはシステムベースの部品で作りました。ウェーブジェネレータの楕円は長軸の長さの精密な調整が必要です。そのため1/5スタッド単位で長さの調整をしています。長すぎると回転摩擦が大きくなり、短すぎるとラチェッティングが発生します。
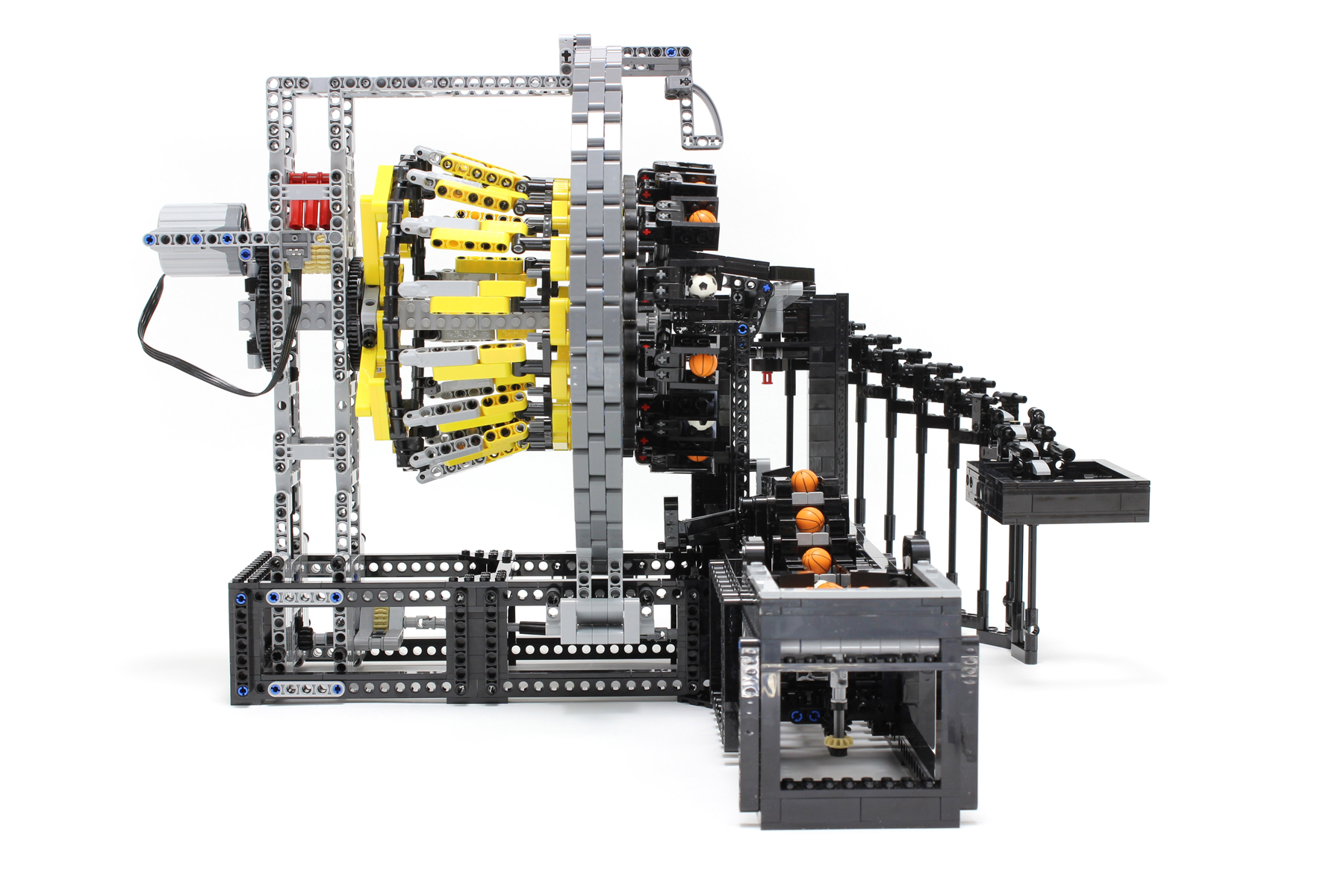
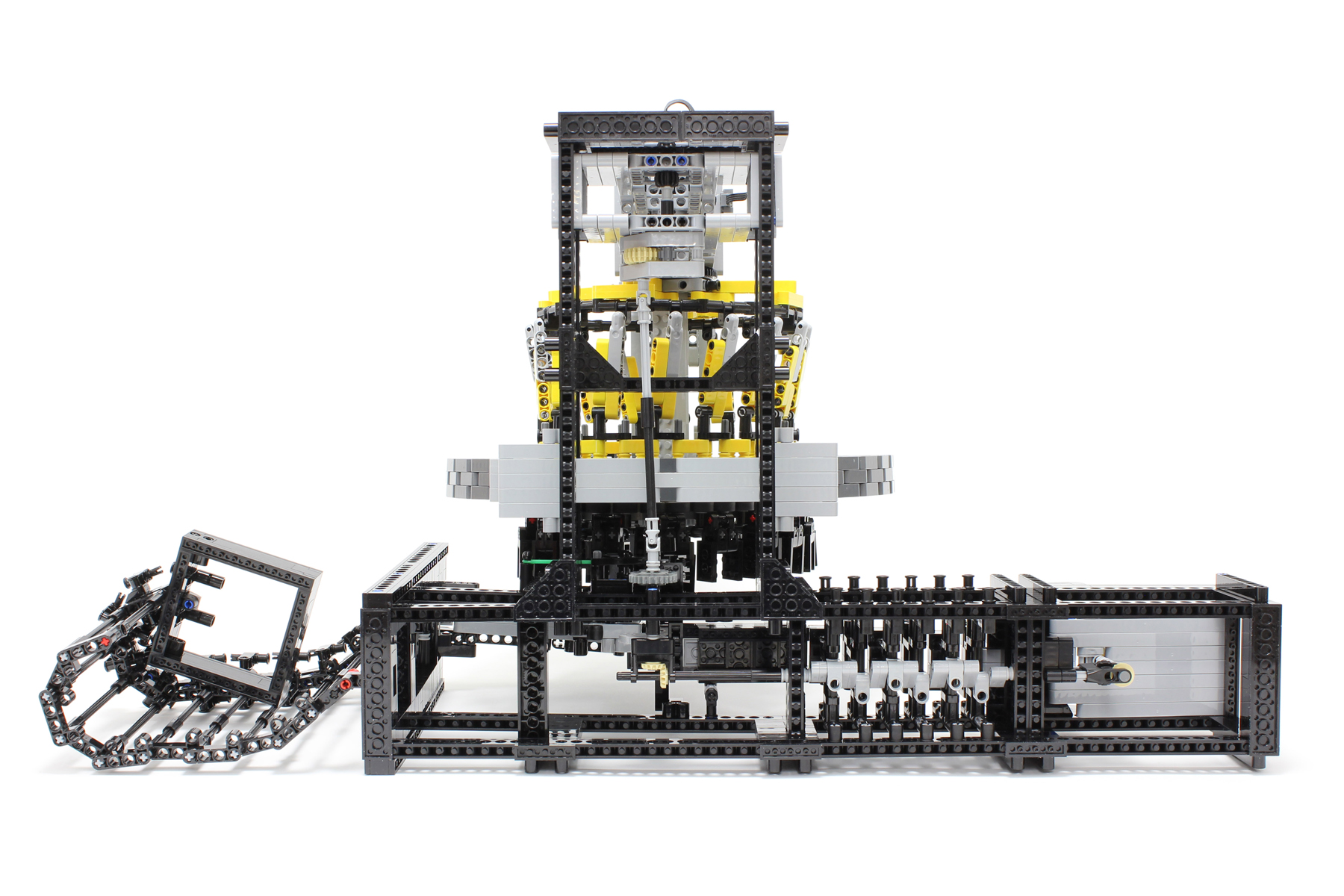
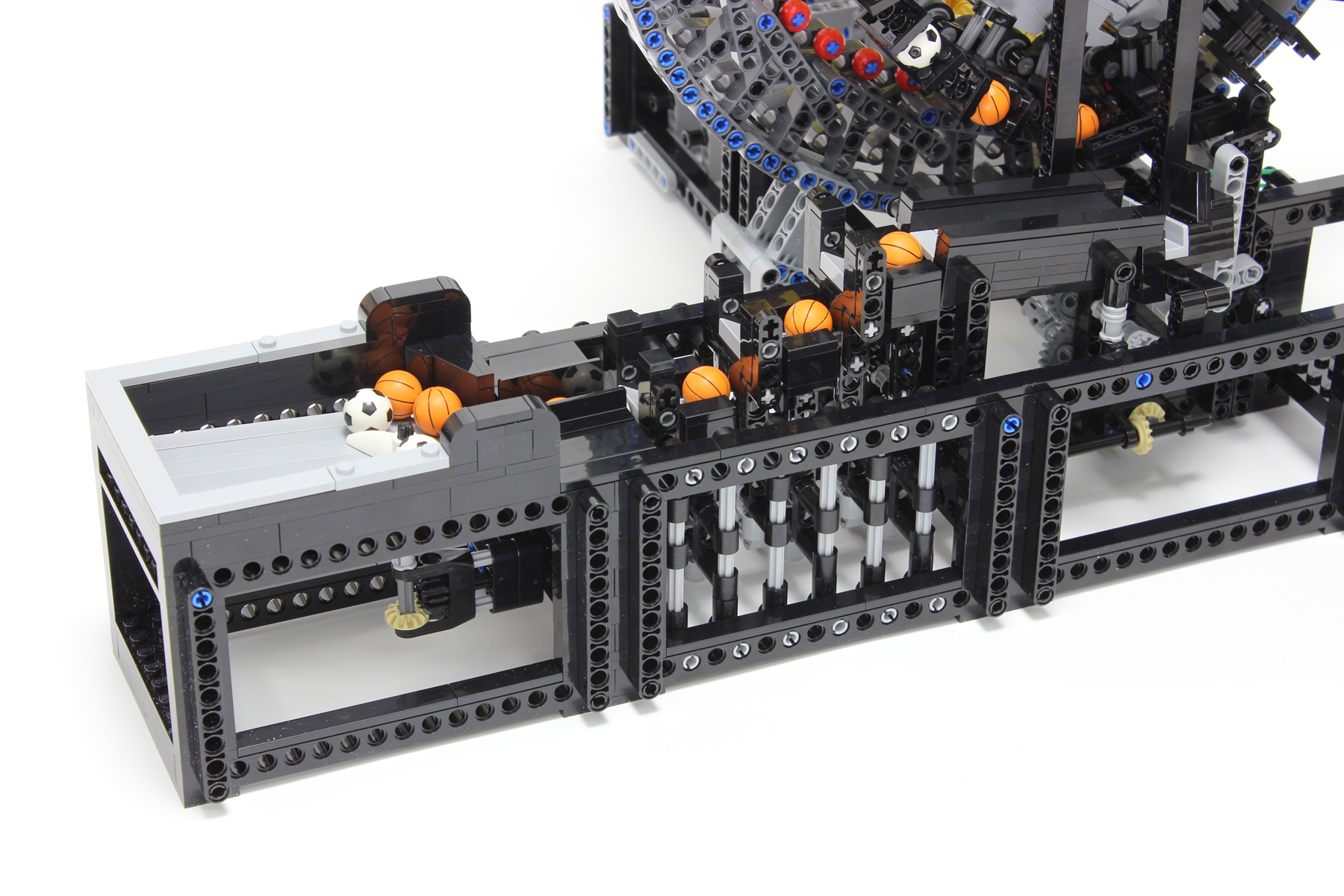
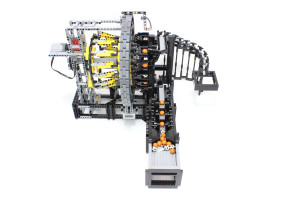
このモジュールにはウェーブジェネレータ、ストッパー、階段、かき混ぜ羽根の4つの駆動部があります。ストッパーは波動歯車装置のボール乗り口にあり、ボールが波動歯車装置へ入るタイミングを決めています。それら全ての駆動部をPF XLモーター1つで駆動しています。モーターの力を確実に伝えるため、トルクリミッタは入れていません。
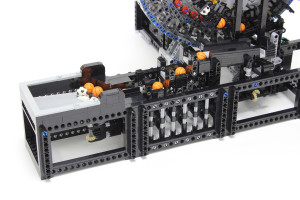
ボールの入力部は、Cycloidal drive GBCモジュールで使用した階段を流用しています。出力部は、Fork to Fork GBCモジュールの出力部Snake slideを流用しています。
このモジュールの耐久性は未検証です。波動歯車部分にかかっている負荷が大きいので耐久性は低いと思います。

製作開始:2015年10月
完成:2016年3月
公開:2016年4月
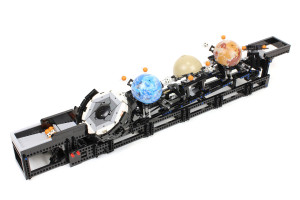

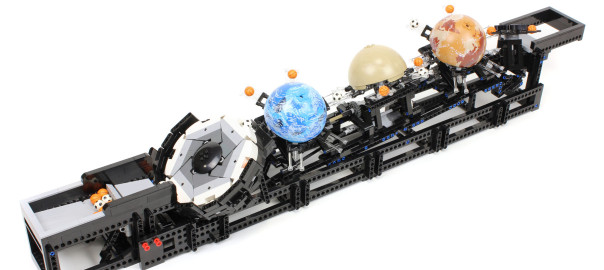
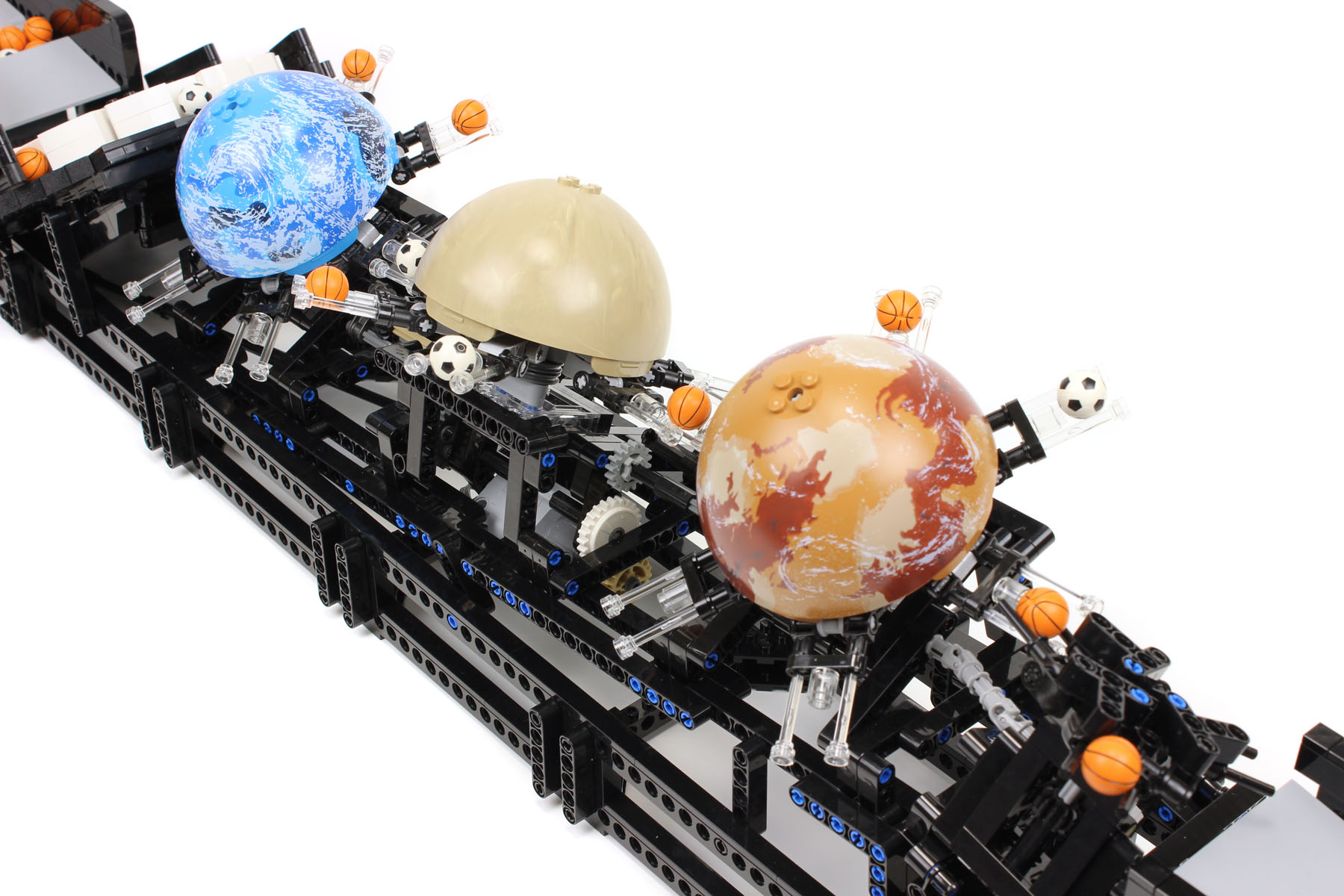
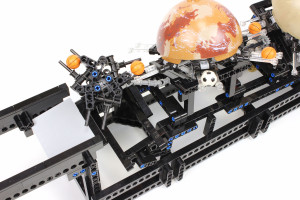
アンテナパーツ(ID 3957)を使ったGBCモジュールの第3弾です。デコレーションとしてスターウォーズシリーズの惑星を使っています。当初は惑星のデコレーション無しで完成させる予定でしたが、偶然別の目的で机にあったスターウォーズの惑星を取り付けたところ丁度よかったので、宇宙船が太陽系の惑星の周りを順に移動してゆくモジュールという設定にしました。
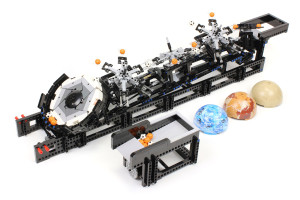
動きは4枚のローターが連続回転しているだけのシンプルなものです。それぞれのローターの回転軸が傾いているのがポイントで、それによりボールが乗り移っていきます。
各回転部分の位相合わせが厳しいので、各回転軸の位相は細かく調整できるように工夫しています。一度調整すると安定して動作します。
いつも輸送に使っている箱の長さ(73cm)に収まるように分割構造にしています。
苦労した部分はモジュールのボール排出部です。三角形ローターの櫛歯の形状に苦労しました。

駆動はPF Lモーター1つです。
製作開始:2015年10月
完成:2015年10月
公開:2015年10月
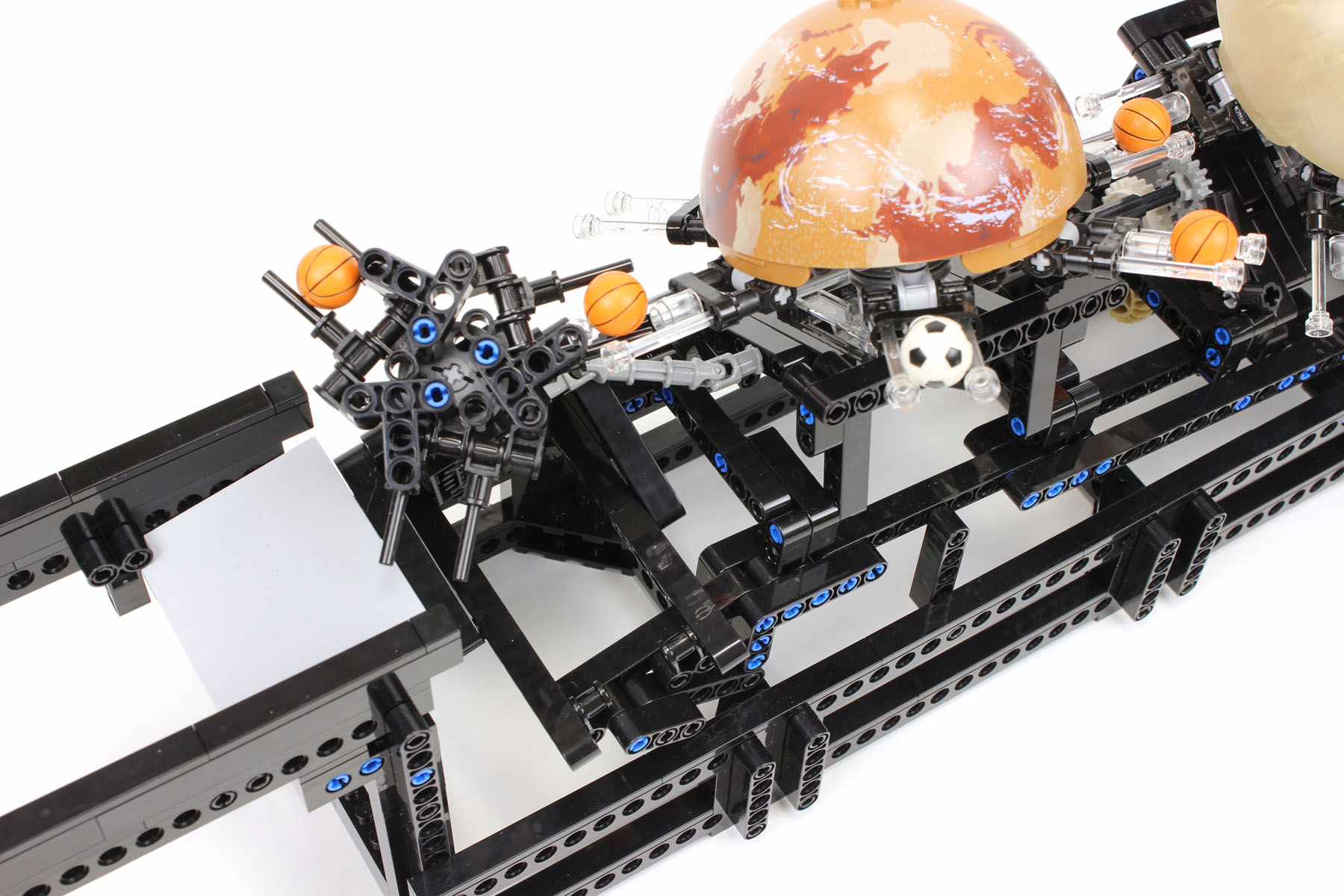
アンテナパーツ(ID 3957)を使ったGBCモジュールの第2弾です。アンテナパーツがフォークの先の部分に使われています。フォークの円を描くような運動がボールをひとつずつ受け渡しします。


それぞれのフォークの先には4本のアンテナパーツが四角く取り付けられています。この4本のアンテナパーツがボールを拘束します。4本のアンテナパーツの配置は正方形ではなく長方形にしてあります。もし、4本のアンテナパーツの配置が正方形だとボールを受け渡すことはできません。アンテナパーツの配置が長方形のフォークを縦向きと横向きに90度ずつ違えて交互に配置することによって、フォークの先が互いにぶつからずにすり抜けて、ボールの受け渡しが可能になります。
このモジュールのフォークでボールを持ち上げる機構は高さ方向に厚みがでてしまいます。そのため、フォークでボールを運ぶ機構だけではGBCモジュールとして成り立ちません。最初にボールを受けとる部分の高さが高くなってしまい、GBCモジュールの規格を満たせないからです。このモジュールでは、受け口とフォークでボールを運ぶ機構の間に回転ホイールを挟むことで、GBCモジュールの規格を満たしています。回転ホイールはフォークに決まった時間間隔でボールを供給するバッファの役目も果たしています。この回転ホイールの組み方は2009年にデザインしたものの使いまわしです。この回転ホイールでボールを持ち上げるという手法は私のアイデアではありません。
このモジュールは機構がシンプルなので安定しています。出力部はフレキシブルな滑り台にしました。 見た目が良くて実用性もあるので気に入っています。
製作開始:2015年6月
完成:2015年8月
公開:2015年8月
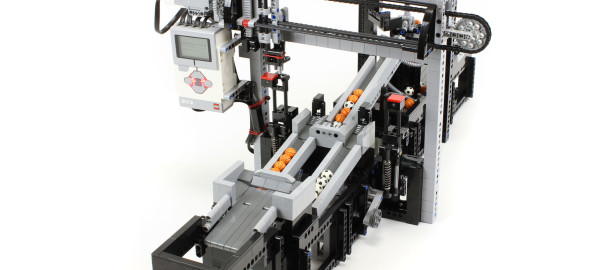
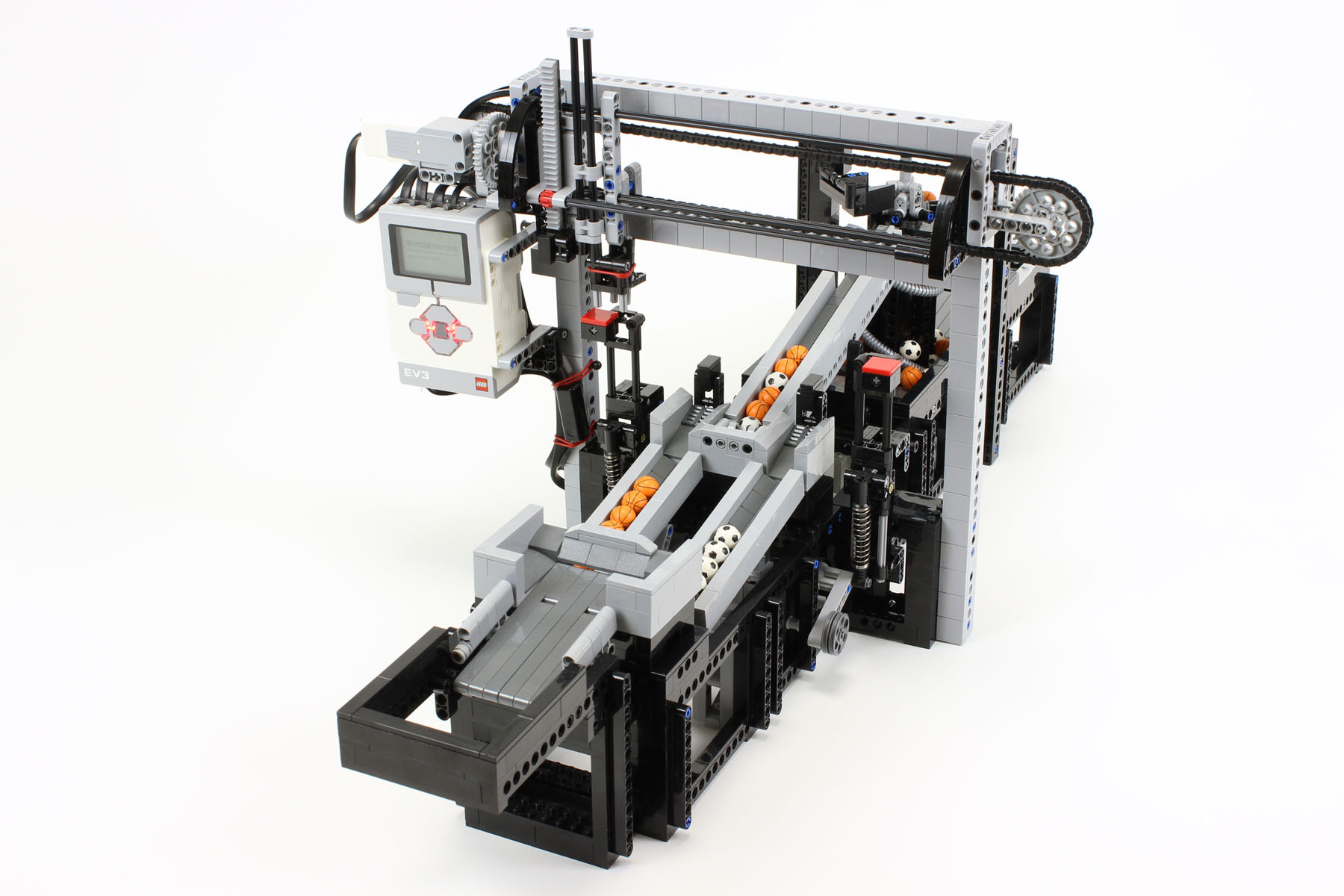
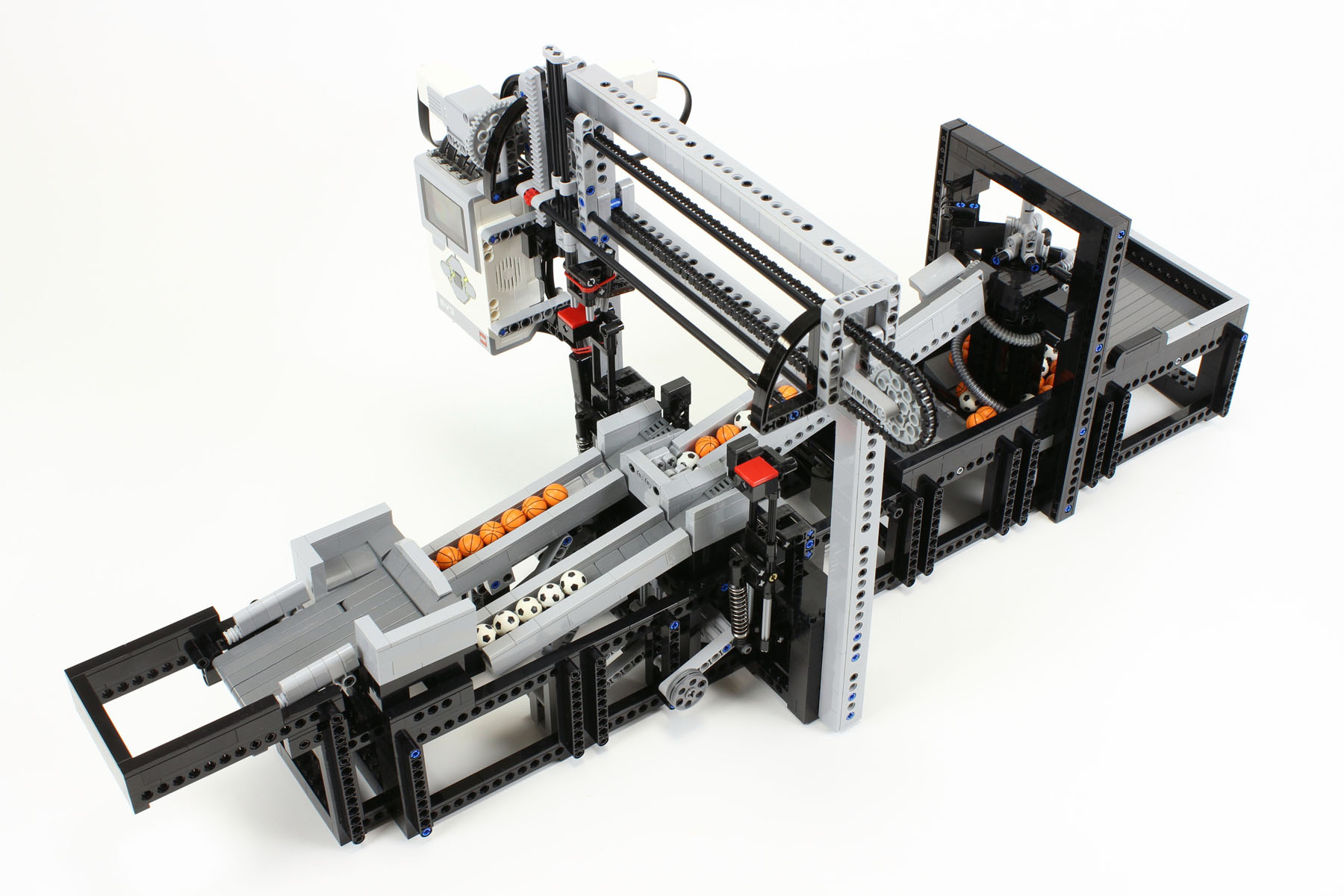
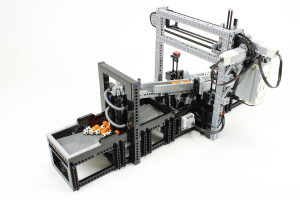
マインドストームEV3を使って製作されたGBC用のボールソーターです。
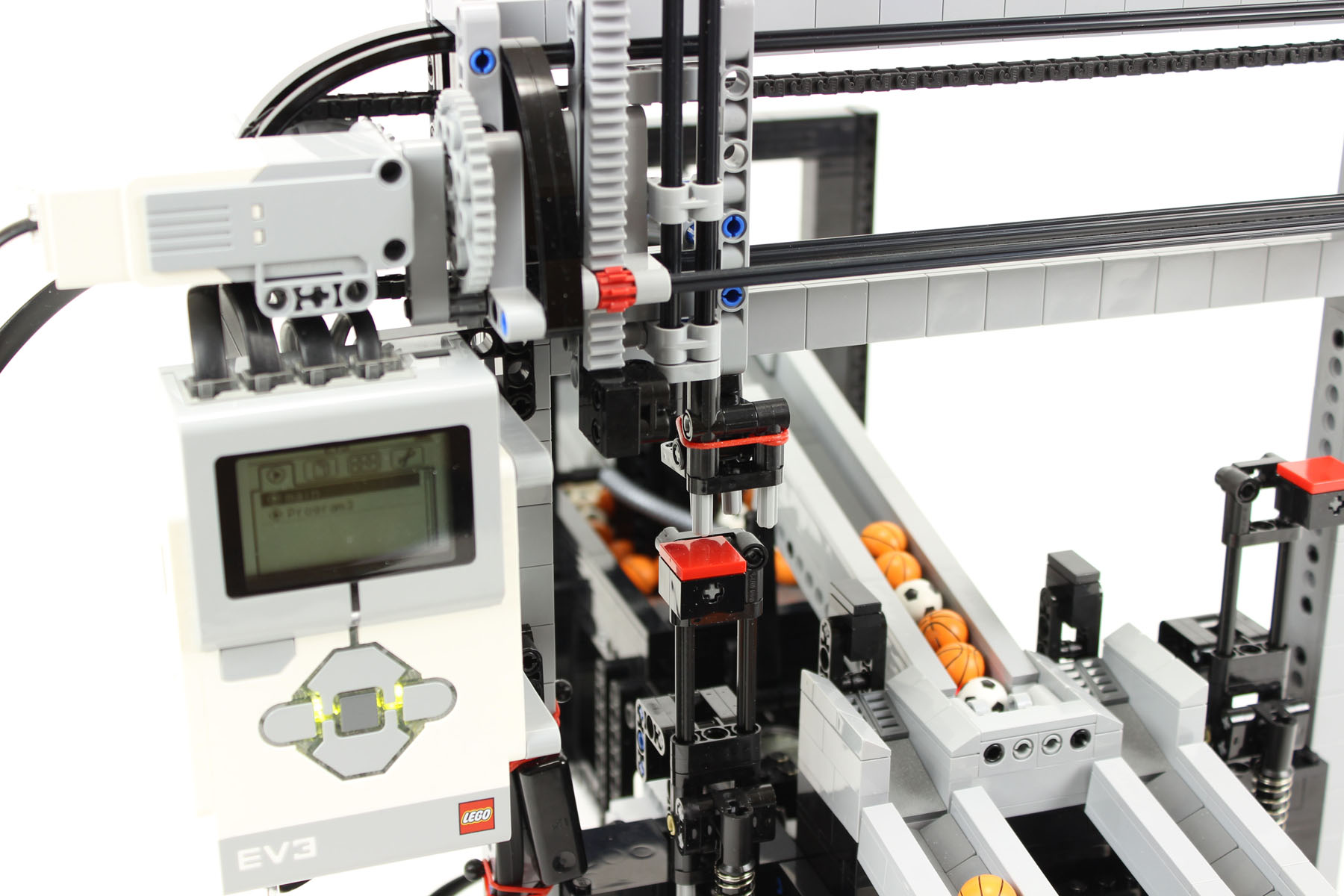
2軸の直交ロボットがピック&プレース動作でサッカーボールとバスケットボールを選別します。2軸の直交ロボットの動きは高速で、ボールを仕分ける速度は1秒間に2個以上です。サッカーボールとバスケットボールの判別は、レールの下側に埋め込んであるEV3カラーセンサーで行っています。


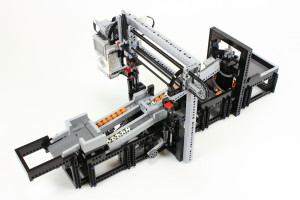
2軸の直交ロボットはスピードを重視して製作しました。ロボットを早く動かすためには、ロボットの可動部をできるだけ軽くする必要があります。このモデルでは、スピードアップの邪魔になる重いモーターを全て固定部に取り付け、ハンド部を軽くしています。32Lロングシャフトとスライドする赤い8歯ギヤでそれを実現しています。ロボットは思っていたよりも高速にできたので、当初はボールをひとつずつ切り出す機構の方がロボットのスピードに追い付かなかったです。
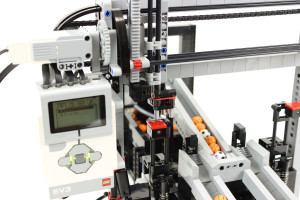
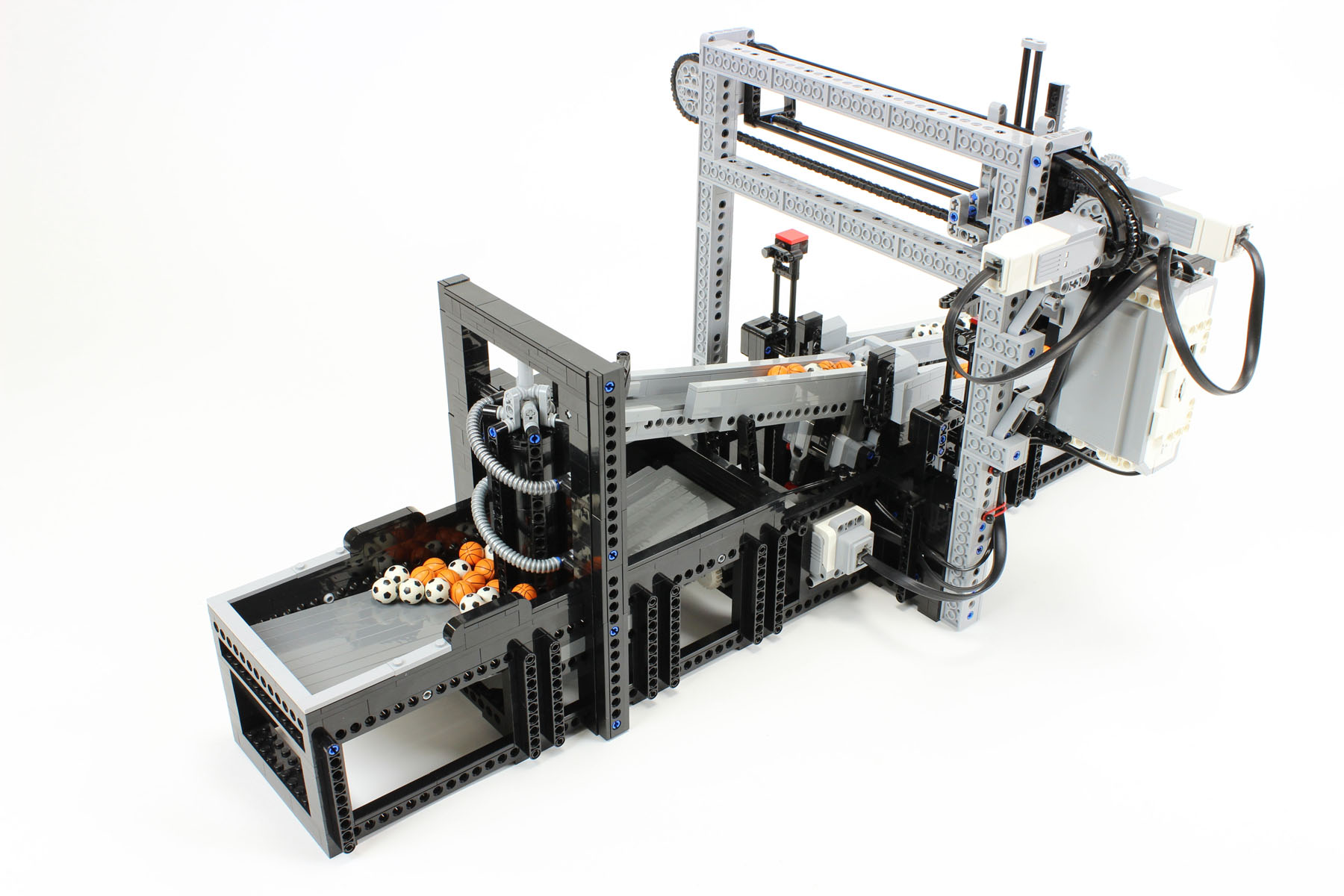
ロボットの駆動にはEV3のMサイズサーボを2つ使っています。パワーの大きいEV3のLサイズサーボを使いたかったのですが、EV3のLサイズのサーボは、モーター内部のギヤバックラッシュが大きく、ギヤ比がトルク重視で使いにくいのでMサイズを使っています。
プログラムは家庭版EV3ソフトウェアで書いています。EV3はバスケットボールとサッカーボールの個数をカウントしていて、レーンがいっぱいになると、自動でボールの排出動作を行います。ボールの排出の動作も2軸直交ロボットで行うようにしています。ボールを仕分ける高速な動きと、ボールを排出するときの低速で丁寧な動きの対比が面白いと思っています。
製作開始:2015年4月
完成:2015年6月
公開:2015年6月
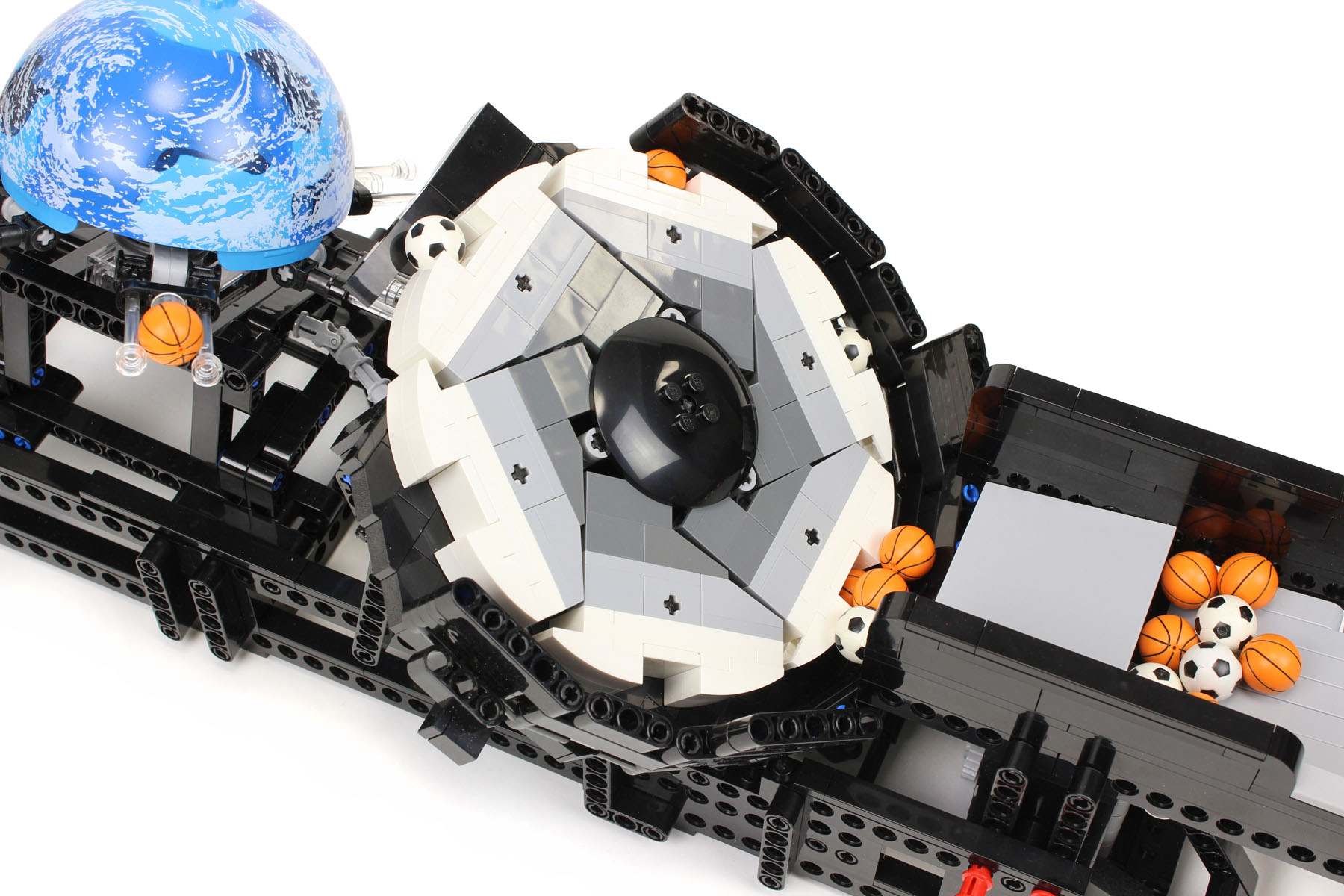
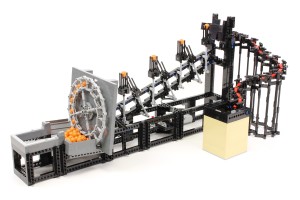
サイクロ減速機の機構に着想を得て作られたGBCモジュールです。サイクロ減速機のサイクロイダルディスクの動きを利用してボールを運びます。ただし、レゴでサイクロ減速機の構造を再現することは難しいので、減速機の形は実際のものとかなり変えてあります。実際の減速機では、サイクロイダルディスクは滑らかな特殊な形状をしていますが、レゴブロックでは再現が難しいので、ピン歯車に置き換えています。そのためピン歯車は外側のギヤ(リングギヤ)と一か所でしか噛み合っていません。厳密にはこれはサイクロ減速機とは呼べないと思います。しかし、サイクロ減速機の動きの面白さは伝わっていると思います。
ボールのつかむ部分、離す部分はサイクロ減速機の特殊な動きを有効に利用できるよう工夫しました。回転中心にある矢印は歯の噛み合っている部分を指し示しています。
サイクロ減速機の動きを使ってボールを運ぶ部分と6段の階段を組み合わせてGBCモジュールとしています。階段はバッファーと一定の時間間隔でボールを供給する役目をしています。このモジュールの動作は安定しています。
実際に機能するリングギヤとサイクロイダルディスクを再現するには、精度の良い正多角形を作る必要があります。しかし、レゴブロックでは、多角形を簡単につくることはできません。このモデルでは、リフトアームを三角形に組むと自由な角度が作れることを利用し、9角形と10角形をつくっています。9角形と10角形に剛性を持たせることに苦労しました。サイクロイダルディスクとリングギヤそれぞれの9と10という歯数はレゴでの作りやすさから決めました。